Ориентирование по местным признакам
Ориентирование по местным признакамОриентирование по местным признакам
Ориентироваться можно: по карте, компасу, солнцу, часам, звездам, природным признакам и явлениям и разным подсказкам. Например: если вы утром выглянете в окошко и увидите людей с зонтиками, значит на улице дождик, а если идет снег, то скорей всего это зима и надо одеваться теплее (шутка).
Ориентирование – это умение определить стороны света, представить себе направление дорог и расположение населенных пунктов по отношению к тому месту, в котором вы находитесь. Дорогу всегда можно найти, зная расположение сторон света. Их всего четыре: север (N), восток (E), юг (S) и запад (W).
Ориентирование на местности является одним из важных условий обеспечения жизнедеятельности и успешного выполнения поставленных задач. Ориентирование на местности по карте и компасу большой сложности не представляет.
Ориентирование по Солнцу.
Места восхода и захода Солнца по временам года различны: зимой Солнце восходит на юго-востоке, а заходит на юго-западе; летом Солнце восходит на северо-востоке, а заходит на северо-западе; весной и осенью Солнце восходит на востоке, а заходит на западе. В полдень Солнце всегда находится в направлении юга. Самая короткая тень от местных предметов бывает в 13 часов, и направление тени от вертикально расположенных местных предметов в это время будет указывать на север. Если солнце скрыто облаками, поставьте нож на ноготь пальца
— хотя бы небольшая, но тень появится и станет ясно, где солнце.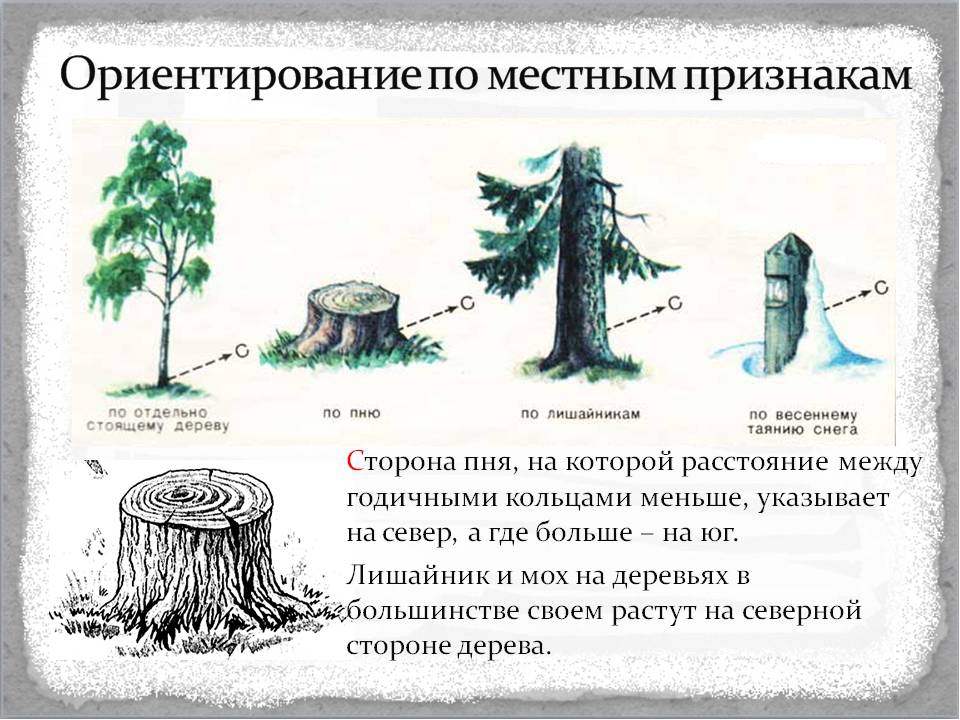
По Солнцу и часам.
Надо направить часовую стрелку на Солнце, и угол, образуемый между направлением часовой стрелки и цифрой 1 (13 часов) циферблата, разделить воображаемой линией пополам. Линия, разделяющая этот угол, укажет направление: впереди — юг, сзади — север. При этом надо помнить, что до 13 часов нужно делить левый угол, а во вторую половину дня — правый угол.
По Полярной звезде.
Полярная звезда всегда находится на севере. Чтобы найти Полярную звезду, надо сначала найти созвездие Большой Медведицы, напоминающее ковш, составленный из семи довольно ярких звезд, затем через две крайние правые звезды Большой Медведицы мысленно провести линию, на которой отложить пять раз расстояние между этими крайними звездами, и тогда в конце этой линии найдем Полярную звезду, которая, в свою очередь, находится в хвосте другого созвездия, называемого Малой Медведицей.
По Луне.
Для приблизительного ориентирования нужно знать, что летом в первую четверть Луна в 20 часов находится на юге, в 2 часа ночи — на западе, в последнюю четверть в 2 часа ночи — на востоке, в 8 часов утра — на юге. При полнолунии ночью стороны горизонта определяются так же, как по Солнцу и часам, причем Луна принимается за Солнце. Необходимо помнить, что полная Луна противостоит Солнцу, т.е. находится против него.
По таянию снега.
Известно, что южная сторона предметов нагревается больше чем северная, соответственно и таяние снега с этой стороны происходит быстрее. Это хорошо видно ранней весной и во время оттепелей зимой на склонах оврагов, лунках у деревьев, снегу, прилипшему к камням.
По тени.
В полдень направление тени (она будет самая короткая) указывает на север. Не дожидаясь самой короткой тени можно ориентироваться следующим способом. Воткните в землю палку около 1 метра длиной. Отметьте конец тени. Подождите 10-15 минут и повторите процедуру. Проведите линию от первой позиции тени до второй и продлите на шаг дальше второй отметки. Станьте носком левой ноги напротив первой отметки, а правой — в конце линии, которую вы начертили. Сейчас вы стоите лицом на север.
Не дожидаясь самой короткой тени можно ориентироваться следующим способом. Воткните в землю палку около 1 метра длиной. Отметьте конец тени. Подождите 10-15 минут и повторите процедуру. Проведите линию от первой позиции тени до второй и продлите на шаг дальше второй отметки. Станьте носком левой ноги напротив первой отметки, а правой — в конце линии, которую вы начертили. Сейчас вы стоите лицом на север.
По местным предметам.
- кора большинства деревьев грубее на северной стороне, тоньше, эластичнее (у березы — светлее) — на южной;
- у сосны вторичная (бурая, потрескавшаяся) кора на северной стороне поднимается выше по стволу;
- с северной стороны деревья, камни, деревянные, черепичные и шиферные кровли раньше и обильнее покрываются лишайниками, грибками;
- на деревьях хвойных пород смола более обильно накапливается с южной стороны;
- муравейники располагаются с южной стороны деревьев, пней и кустов; кроме того, южный скат муравейников пологий, а северный — крутой;
- весной травяной покров более развит на северных окраинах полян, прогреваемых солнечными лучами; в жаркий период лета — на южных, затененных;
- ягоды и фрукты раньше приобретают окраску зрелости (краснеют, желтеют) с южной стороны;
- летом почва около больших камней, строений, деревьев и кустов более сухая с южной стороны, что можно определить на ощупь;
- снег быстрее подтаивает на южных склонах; в результате подтаивания на снегу образуются зазубрины — «шипы», направленные на юг;
- в горах дуб чаще произрастает на южных склонах.
 Прочие признаки:
Прочие признаки: - просеки в больших лесных массивах, как правило, ориентируются в направлении север — юг и запад — восток; нумерация кварталов лесных массивов в СССР идет с запада на восток и далее на юг;
 Прочие признаки:
Прочие признаки:· на отдельно стоящем дереве самые густые ветви, как правило, растут с южной стороны, поскольку туда попадает больше солнечных лучей;
· цветы подсолнечника всегда поворачиваются за солнцем и никогда не смотрят на север;
· перелетные птицы весной летят на север, а осенью на юг;
· около отдельно стоящих деревьев снег с северной стороны рыхлый, а с южной
покрывается корочкой, потому что на него светит солнышко.
По постройкам.
К постройкам, которые довольно строго ориентированы по сторонам горизонта, относятся церкви, мечети, синагоги. Алтари и часовни христианских и лютеранских церквей обращены на восток, колокольни на запад. Опущенный край нижней перекладины креста на куполе православной церкви обращен к югу, приподнятый — к северу. Алтари католических костелов располагаются на западной стороне. Двери синагог и мусульманских мечетей обращены примерно на север, а их противоположные стороны направлены: мечетей — на Мекку в Аравии, лежащую на меридиане Воронежа, а синагог — на Иерусалим в Палестине, лежащий на меридиане Днепропетровска. Кумирни, пагоды, буддийские монастыри фасадами обращены на юг.
Алтари и часовни христианских и лютеранских церквей обращены на восток, колокольни на запад. Опущенный край нижней перекладины креста на куполе православной церкви обращен к югу, приподнятый — к северу. Алтари католических костелов располагаются на западной стороне. Двери синагог и мусульманских мечетей обращены примерно на север, а их противоположные стороны направлены: мечетей — на Мекку в Аравии, лежащую на меридиане Воронежа, а синагог — на Иерусалим в Палестине, лежащий на меридиане Днепропетровска. Кумирни, пагоды, буддийские монастыри фасадами обращены на юг.
Выход из юрт обычно делают на юг. В домах сельской местности больше окон в жилых помещениях прорубается с южной стороны, а краска на стенах строений с южной стороны выцветает больше и имеет жухлый цвет.
В больших массивах культурного леса определить стороны горизонта можно по просекам, которые, как правило, прорубаются строго по линиям север-юг и восток-запад, а также по надписям номеров кварталов на столбах, установленных на пересечениях просек. На каждом таком столбе в верхней его части и на каждой из четырех граней проставляются цифры — нумерация противолежащих кварталов леса; ребро между двумя гранями с наименьшими цифрами показывает направление на север.
На каждом таком столбе в верхней его части и на каждой из четырех граней проставляются цифры — нумерация противолежащих кварталов леса; ребро между двумя гранями с наименьшими цифрами показывает направление на север.
Определение местного времени без часов.
При поломке или утере часов местное время с относительной точностью можно узнать по компасу, измерив азимут по Солнцу. Определив азимут, его значение необходимо разделить на 15 (величина поворота Солнца за 1 час), полученное число будет указывать местное время в момент отсчета. Например, азимут по Солнцу составляет 180°, значит время будет составлять 12 часов.
Ориентирование в лесу.
В литературе имеются рекомендации к определению сторон горизонта по кроне деревьев. Но указание на то, что крона деревьев с южной стороны роскошнее, а годичные кольца прироста древесины на пне срезанного дерева с юга шире, чем с севера, не всегда подтверждается. Дело в том, что в глухом лесу деревья своей тенью закрывают соседние деревья, находящиеся на севере от них. Поэтому более длинные и густые ветки в середине леса могут быть направлены не только на юг, но и на север, восток, запад, т. е. туда, где больше свободного места. В связи с этим и ежегодный прирост очередного слоя древесины образуется с той стороны, с которой дерево лучше развивается. А значит, не обязательно с южной стороны. И если еще учесть то, что на развитие кроны деревьев, а также на ширину прироста древесины постоянно влияет направление ветров, влага, то вывод ясен. Но он не может быть верным для всех районов страны.
Дело в том, что в глухом лесу деревья своей тенью закрывают соседние деревья, находящиеся на севере от них. Поэтому более длинные и густые ветки в середине леса могут быть направлены не только на юг, но и на север, восток, запад, т. е. туда, где больше свободного места. В связи с этим и ежегодный прирост очередного слоя древесины образуется с той стороны, с которой дерево лучше развивается. А значит, не обязательно с южной стороны. И если еще учесть то, что на развитие кроны деревьев, а также на ширину прироста древесины постоянно влияет направление ветров, влага, то вывод ясен. Но он не может быть верным для всех районов страны.
Исключением может быть Север, где тепла и света от солнца значительно меньше, чем влаги, и где деревья развиваются лучше в сторону юга. В средних широтах умеренного климата только по деревьям, стоящим на открытом месте, можно определить направление север — юг. Стороны горизонта в лесу можно определить по коре деревьев. Нужно помнить, что южная сторона деревьев, получая больше тепла и света, чем северная, имеет более сухую и светлую кору.
 А учитывая, что береза очень чувствительна к ветрам, наклон ее ствола также поможет ориентироваться в лесу. Для определения сторон горизонта можно использовать крупные камни и валуны. Их северная сторона покрыта лишайниками и мхом, которые не любят тепла и света. Да и почва возле такого камня поможет, если отсутствуют лишайники и мох: почва с северной стороны такого камня более влажная, чем с южной. Помогут ориентироваться в лесу и его обитатели. Так, белка устраивает свое жилище только в дуплах, расположенных с противоположной стороны господствующих ветров. А муравейники располагаются с южной стороны какого-либо дерева или пня. Притом южная сторона его отлогая, северная — круче. Весной снег быстрее тает на склонах оврагов, лощин, выемок, обращенных к югу. Трава весной выше и гуще с южной стороны отдельных камней, построек, опушек леса, а летом при длительной жаре остается более зеленой с северной стороны.
А учитывая, что береза очень чувствительна к ветрам, наклон ее ствола также поможет ориентироваться в лесу. Для определения сторон горизонта можно использовать крупные камни и валуны. Их северная сторона покрыта лишайниками и мхом, которые не любят тепла и света. Да и почва возле такого камня поможет, если отсутствуют лишайники и мох: почва с северной стороны такого камня более влажная, чем с южной. Помогут ориентироваться в лесу и его обитатели. Так, белка устраивает свое жилище только в дуплах, расположенных с противоположной стороны господствующих ветров. А муравейники располагаются с южной стороны какого-либо дерева или пня. Притом южная сторона его отлогая, северная — круче. Весной снег быстрее тает на склонах оврагов, лощин, выемок, обращенных к югу. Трава весной выше и гуще с южной стороны отдельных камней, построек, опушек леса, а летом при длительной жаре остается более зеленой с северной стороны.
Следует помнить, что признаны ошибочными способы ориентирования по:
— ширине годовых колец;
— густоте веток на деревьях;
— выростам мха на стволах деревьев;
— муравейникам и норкам сусликов.

Чтобы правильно ориентироваться, не пользуйтесь одним-двумя способами. Соберите все доступные способы. Проверяйте себя постоянно. Направление, подтвержденное шестью-семью способами и опровергнутое не более двух раз, можно считать в принципе достаточно точным.
Сайт управляется системой uCozОриентирование на местности без карты и компаса
Оказавшись в незнакомой местности, прежде всего необходимо сориентироваться, то есть определить своё местоположение относительно сторон горизонта с помощью компаса, карты, плана местности или аэроснимка.
Приближённое ориентирование на местности можно производить по местным ориентирам (естественным и искусственным), положению Солнца, звёзд. Напоминаем, что если встать лицом на север, то позади будет юг, справа — восток, слева — запад. Кроме основных сторон горизонта есть и промежуточные, например: северо-восток (СВ), северо-запад (СЗ), юго-восток (ЮВ), юго-запад (ЮЗ).
При отсутствии карты и компаса северное направление можно определить следующим образом.
Ориентирование по Солнцу. В Северном полушарии Солнце находится на востоке примерно в 7 ч, на юге — в 13 ч, на западе — в 19 ч. Положение Солнца в эти часы и укажет соответственно направление на восток, юг и запад.
Ориентирование по Солнцу и часам. Для определения сторон горизонта по Солнцу можно использовать наручные часы. В горизонтальном положении они устанавливаются так, чтобы часовая стрелка была направлена на Солнце. Угол между часовой стрелкой и направлением на цифру 1 (13 часов) на циферблате делится пополам прямой линией, которая указывает направление на юг.
В первой половине дня надо делить пополам ту дугу (угол), которую стрелка должна пройти до 13 ч, а во второй — ту дугу, которую она прошла после 13 ч.
Ориентирование по звёздам. Вы наверняка знаете созвездие Большой Медведицы (семь ярких звёзд), которое по форме напоминает ковш. Над ним видна Полярная звезда. Она находится в созвездии Малая Медведица. Эта звезда имеет замечательное свойство: в любое время года, в любой час она указывает направление точно на север.
Эта звезда имеет замечательное свойство: в любое время года, в любой час она указывает направление точно на север.
Отыскать Полярную звезду на небосклоне довольно просто. Надо на линии, проходящей через две крайние звезды ковша Большой Медведицы, отложить отрезок, длина которого в 5 раз больше, чем расстояние между этими звёздами. На конце воображаемого отрезка и будет Полярная звезда. Наблюдая за ней, можно точно определить направление на север, а значит, и другие стороны горизонта. Помните? Если встать лицом на север, то позади будет юг, направо — восток, а налево — запад.
Если нет компаса и не видно небесных светил, то стороны горизонта могут быть определены по местным признакам:
- мох или лишайник покрывает стволы деревьев, камни и пни с северной стороны; если мох растёт по всему стволу дерева, то на северной стороне, особенно у корня, его больше;
- кора деревьев с северной стороны обычно грубее и темнее, чем с южной;
- весной трава на южных окраинах лесных прогалин и полян, а также с южной стороны отдельных деревьев, пней, больших камней растёт гуще;
- муравейники, как правило, находятся к югу от ближайших деревьев и пней; южная сторона муравейника более пологая, чем северная;
- на южных склонах холмов весной снег тает быстрее, чем на северных.

Имеются и другие признаки, по которым можно определить стороны горизонта. Например, просеки в лесных массивах, как правило, прорубаются по направлениям «север — юг» и «восток — запад», а лесные кварталы нумеруются с запада на восток.
Ориентирование по природным признакам на сайте ПоискПути
Полезные знания про выживание в природе. Как определить стороны света без компаса. Как определить стороны света по муравейникам, растениям, мху, а так же небесным телам.
Отправляясь в незнакомое место, в поход, на природу или иное путешествие «дикарем», важно уметь ориентироваться на местности без использования современных гаджетов и устройств. Даже если они оказались у вас под рукой, то всей технике свойственно разряжаться. В любом случае человек может ориентироваться на местности по природным признакам: растениям, солнцу, луне, звездам.
Определение местонахождения человека по местным признакам зачастую носит примерный характер. Несмотря на некоторые погрешности, ориентирование на местности по природным особенностям помогает человеку найти выход из сложной ситуации.
При ориентировании на месте по природе необходимо учесть следующие факторы:
- Нельзя брать в качестве ориентира ветви и кольца деревьев. Чтобы определить стороны света, достаточно следить за тенью ствола дерева, отмечая ее длину. Самая короткая тень укажет на север при нахождении в северном полушарии, на юге — наоборот.
- Определить стороны света можно по расположению муравейников. Как правило, они находятся с южной стороны от деревьев, пней и кустарников.
- Человек может ориентироваться по коре деревьев и лишайникам, которые обитают на деревьях. В частности, лишайники предпочитают расти на северной стороне дерева. Среди народных примет можно также выделить ориентирование по коре березы, которая обычно мягче и светлее с южной стороны дерева.
- В жару на хвойных породах деревьев можно встретить подтеки смолы. Выделение смолы происходит чаще с той стороны дерева, которая обращена к югу.
- При созревании ягоды и плоды сначала окрашиваются с той стороны, которая смотрит на юг.

Чтобы ориентироваться по естественным признакам, необходимо знать особенности природных условий места. Чтобы исключить ошибку, лучше всего ориентироваться на месте несколькими способами.
|
Приемы ориентирования Измерение расстояний на местности
Приемы ориентирования
Ориентироваться
на местности, это значит найти направления на стороны света (север, юг, восток и
запад) и определить свое местонахождение. Знание топографического ориентирования имеет важное значение, особенно при прохождении по незнакомой местности и при плохой видимости. Под топографическим ориентированием следует понимать ориентирование на местности, т. е. определение места своего расположения относительно сторон горизонта, окружающих местных предметов и рельефа местности.
По компасу.
Из
многочисленных систем компасов в туристской практике нашел самое широкое
применение жидкостный компас «Спорт-3». При пользовании любым компасом следует
помнить, что в свободно подвешенном состоянии магнитная стрелка своими концами
будет направлена на север и на юг.
При помощи
компаса наиболее удобно и быстро можно определить север, восток, юг, запад. Для
этого нужно компасу придать горизонтальное положение, освободить от зажима
стрелку, дать ей успокоиться. Тогда темный конец ее будет направлен на север.
Для определения точности отклонения направления движения от направления на север
или для определения положений точек местности по отношению к направлению на
север и их отсчета, на компасе нанесены деления, из которых нижние обозначены в
градусных мерах (наименьшее деление равно 3°), а верхние деления угломера в
десятках «тысячных».
На подвижной
крышке компаса имеется визирное приспособление (прицел и мушка), против которых
укреплены светящиеся указатели, служащие для обозначения направления движения
ночью. В армии наиболее распространены компас системы Андрианова и
артиллерийский компас. Компас Андрианова позволяет производить отсчеты в
градусах и в тысячных. Надписи на неподвижной шкале градусных делений (цена
деления 3°) даны по часовой стрелке через 15°, а тысячных — в обратном
направлении через 500 тысячных (5-00). Визирное приспособление подвижно.
Артиллерийский компас отградуирован только в тысячных с ценой деления 100
тысячных (1-00) по часовой стрелке. Ориентирование по карте.
Для этого
ориентируют крупномасштабную карту по линиям местности (по прямым участкам
дорог, каналов, просек и т. п.) накладывают компас нулевым диаметром на линию
истинного меридиана и по отклонению магнитной стрелки судят о величине и
направлении магнитного склонения. Нужно помнить, что для ориентирования карт в
этом случае нельзя использовать линии электропередач, линии железных дорог,
линии связи и т. По Солнцу.
Места восхода и
захода Солнца по временам года различны: зимой Солнце восходит на юго-востоке, а
заходит на юго-западе; летом Солнце восходит на северо-востоке, а заходит на
северо-западе; весной и осенью Солнце восходит на востоке, а заходит на западе. По Солнцу и часам. Надо направить часовую стрелку на Солнце, и угол, образуемый между направлением часовой стрелки и цифрой 1 (13 часов) циферблата, разделить воображаемой линией пополам. Линия, разделяющая этот угол, укажет направление: впереди — юг, сзади — север. При этом надо помнить, что до 13 часов нужно делить левый угол, а во вторую половину дня — правый угол. По Полярной звезде.
Полярная звезда
всегда находится на севере. Чтобы найти Полярную звезду, надо сначала найти
созвездие Большой Медведицы, напоминающее ковш, составленный из семи довольно
ярких звезд, затем через две крайние правые звезды Большой Медведицы мысленно
провести линию, на которой отложить пять раз расстояние между этими крайними
звездами, и тогда в конце этой линии найдем Полярную звезду, которая, в свою
очередь, находится в хвосте другого созвездия, называемого Малой Медведицей. По Луне. Для приблизительного ориентирования нужно знать, что летом в первую четверть Луна в 20 часов находится на юге, в 2 часа ночи — на западе, в последнюю четверть в 2 часа ночи — на востоке, в 8 часов утра — на юге. При полнолунии ночью стороны горизонта определяются так же, как по Солнцу и часам, причем Луна принимается за Солнце. По таянию снега. Известно, что южная сторона предметов нагревается больше чем северная, соответственно и таяние снега с этой стороны происходит быстрее. Это хорошо видно ранней весной и во время оттепелей зимой на склонах оврагов, лунках у деревьев, снегу, прилипшему к камням. По тени.
В полдень
направление тени (она будет самая короткая) указывает на север. По местным предметам. Известно, что смола больше выступает на южной половине ствола хвойного дерева, муравьи устраивают свои жилища с южной стороны дерева или куста и делают южный склон муравейника более пологим, чем северный. Кора березы и сосны на северной стороне темнее, чем на южной, а стволы деревьев, камни, выступы скал гуще покрыты мхом и лишайниками. По постройкам.
К постройкам,
которые довольно строго ориентированы по сторонам горизонта, относятся церкви,
мечети, синагоги.
Определение
местного времени без часов: при поломке или утере часов местное время с
относительной точностью можно узнать по компасу, измерив азимут по Солнцу. Ориентирование в лесу.
В литературе
имеются рекомендации к определению сторон горизонта по кроне деревьев. Но
указание на то, что крона деревьев с южной стороны роскошнее, а годичные кольца
прироста древесины на пне срезанного дерева с юга шире, чем с севера, не всегда
подтверждается. Дело в том, что в глухом лесу деревья своей тенью закрывают
соседние деревья, находящиеся на севере от них. Поэтому более длинные и густые
ветки в середине леса могут быть направлены не только на юг, но и на север,
восток, запад, т. е. туда, где больше свободного места. В связи с этим и
ежегодный прирост очередного слоя древесины образуется с той стороны, с которой
дерево лучше развивается. В средних широтах умеренного климата, в частности на территории Украины, только по деревьям, стоящим на открытом месте, можно определить направление север — юг. Стороны горизонта в лесу можно определить по коре деревьев. Нужно помнить, что южная сторона деревьев, получая больше тепла и света, чем северная, имеет более сухую и светлую кору. Это особенно заметно в хвойных лесах.
Помимо этого,
на более освещенной стороне деревьев имеются характерные наплывы и сгустки
смолы, долго сохраняющие светло-янтарный цвет. Для определения сторон горизонта можно использовать крупные камни и валуны. Их северная сторона покрыта лишайниками и мхом, которые не любят тепла и света. Да и почва возле такого камня поможет, если отсутствуют лишайники и мох: почва с северной стороны такого камня более влажная, чем с южной. Помогут ориентироваться в лесу и его обитатели. Так, белка устраивает свое жилище только в дуплах, расположенных с противоположной стороны господствующих ветров. А муравейники располагаются с южной стороны какого-либо дерева или пня. Притом южная сторона его отлогая, северная — круче. Весной снег быстрее тает на склонах оврагов, лощин, выемок, обращенных к югу. Трава весной выше и гуще с южной стороны отдельных камней, построек, опушек леса, а летом при длительной жаре остается более зеленой с северной стороны.
В культурном
лесу просеки прорубаются по линиям: север-юг, восток-запад.
Измерение расстояний на местности
В условиях
путешествий очень важно уметь без помощи приборов определять
расстояния и размеры предметов.
В условиях
путешествий возникает необходимость в измерении расстояния до недоступных
предметов. Пример: Расстояние между зрачками глаз Г=6 см, от конца вытянутой руки до глаза Л=60 см. Пешеход прошел расстояние П, равное 18 шагам; в среднем шаг равен 75 см. Подставляя эти величины в формулу, получим: Д= 18Х(60:6) = 180 шагам или 180Х0,75=135 м.
При осуществлении переправы через реку или ручей на маршруте
возникает необходимость определения ширины реки.
Определение размеров по тени и своему росту.
Высоту
предметов можно определить по тени нужного предмета, по своему росту. Для
определения высоты предмета по его тени необходимо поставить в тени этого
предмета (к примеру, дерева) палку недалеко от его верхушки и измерить длину
части палки, покрытой тенью.
Определение расстояния по эталонам. Расстояние можно определить с помощью эталонов — точных мер. Эталонами могут быть разные части человеческого тела, данные измерений разных предметов, имеющих стандартные размеры:
1. 10 см — длина указательного пальца у взрослого человека. 2. 10 см — расстояние между свободно разведенными концами мизинца и большого пальца, когда рука без напряжения лежит на планшете; 3. высота человека с поднятой рукой, если кисть руки отогнуть назад; 4. высота от пола до пояса человека; 5. расстояние между кончиками пальцев рук в положении «руки в стороны» у большинства людей равняется росту;
6. средняя длина шага взрослого человека равняется приблизительно половине его
роста при измерении до уровня глаз. Практически установлено, что длину своего
шага можно определить по формуле: Р/4 +37, где Р — рост человека в сантиметрах;
4 и 37 — постоянные числа.
7. Расстояние от глаза до основания указательного пальца вытянутой руки
равняется 57 — 60 см. Этой величиной можно пользоваться для нахождения величины
любого угла. Известно, что на указанном расстоянии каждый сантиметр имеет
угловую величину 1°. Поскольку длина указательного пальца равна 10 см, то
достаточно согнуть его в основании под прямым углом к линии всей руки и
измеритель готов: между концом указательного пальца и его основой, т. е.
изгибом, образуется угол 10°. Определение величины любого угла в градусах
делается следующим образом: согнутый под прямым углом у основания указательный
палец на вытянутой руке устанавливается на уровне глаз. Смотреть надо одним
глазом, лучше правым, и держать голову прямо, все время в одном положении. После
этого начинают укладывать свою мерку по прямой, соединяющей два предмета, между
которыми определяется угол.
8.
Указанные выше соотношения между частями человеческого тела приблизительные и
приведены как постоянные величины для человека среднего роста. У детей и
подростков даже одного возраста эти величины неодинаковые, поскольку это связано
с ростом и индивидуальными особенностями. Поэтому желательно, чтобы каждый
турист, готовясь в поход, определил и записал свои мерки. Эталонами могут
служить и такие предметы, которые имеют постоянные стандартные размеры (саперная
лопатка, туристский топорик, спичечный коробок, карандаш, монета). Эти предметы
туристы всегда имеют при себе, и ими всегда можно воспользоваться. В зависимости
от района путешествия южных туристов можно самому составить таблицу расстояний
по степени видимости характерных для этого района местных предметов.
Измерение расстояния шагами.
Для получения наиболее точных результатов необходимо знать длину шага. Как при
проверке длины шага, так и в походных условиях при определении расстояния шаги
лучше всего считать тройками, так как при этом условии пройденное расстояние
получится непосредственно в метрах. Точность этого способа измерения расстояний
зависит от характера рельефа местности, от опытности наблюдателя, от погодных
условий. Можно измерять расстояние и временем, затраченным на ходьбу. Для этого
необходимо заметить количество часов и минут, потраченных для прохождения
известного расстояния. Человек за 1 ч. проходит столько километров, сколько
делает шагов в 3 с. (при шаге длиной 0,83 м). В 1 ч. человек проходит 5 — 6 км.
Следует учитывать, что в походных условиях на скорость ходьбы влияют многие
естественные препятствия.
|
|
 Для отыскания направления по сторонам
света вначале определяют направление север-юг; после чего, став лицом к северу,
определяющий будет иметь направо — восток, налево — запад. Стороны света
обыкновенно находят по компасу, а при отсутствии его — по Солнцу, Луне, звездам
и по некоторым признакам местных предметов.
Для отыскания направления по сторонам
света вначале определяют направление север-юг; после чего, став лицом к северу,
определяющий будет иметь направо — восток, налево — запад. Стороны света
обыкновенно находят по компасу, а при отсутствии его — по Солнцу, Луне, звездам
и по некоторым признакам местных предметов.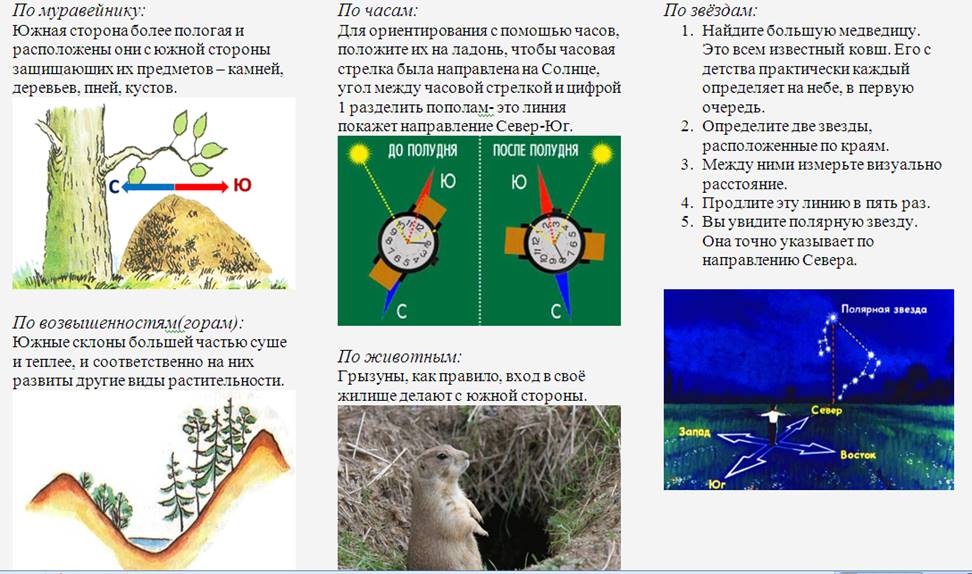 Но это приближенно. Стрелка располагается не
по направлению истинного (географического) меридиана, а по направлению
магнитного меридиана. Угол между истинным меридианом и магнитным называется
склонением магнитной стрелки (магнитное склонение). Оно для каждой местности
различно и может быть восточным (со знаком +) или западным (со знаком — ).
Магнитное склонение можно определить на местности по восходу и закату солнца или
по карте.
Но это приближенно. Стрелка располагается не
по направлению истинного (географического) меридиана, а по направлению
магнитного меридиана. Угол между истинным меридианом и магнитным называется
склонением магнитной стрелки (магнитное склонение). Оно для каждой местности
различно и может быть восточным (со знаком +) или западным (со знаком — ).
Магнитное склонение можно определить на местности по восходу и закату солнца или
по карте. Градусы отсчитываются по ходу часовой стрелки от 0 до 360°,
а деления угломера — против хода часовой стрелки от 0 до 600°. Нулевое деление
находится у буквы «С» (север), там же нанесен светящийся в темноте треугольник,
заменяющий в некоторых компасах букву «С». Под буквами «В» (восток), «Ю» (юг),
«3» (запад) нанесены светящиеся точки.
Градусы отсчитываются по ходу часовой стрелки от 0 до 360°,
а деления угломера — против хода часовой стрелки от 0 до 600°. Нулевое деление
находится у буквы «С» (север), там же нанесен светящийся в темноте треугольник,
заменяющий в некоторых компасах букву «С». Под буквами «В» (восток), «Ю» (юг),
«3» (запад) нанесены светящиеся точки. Визирное приспособление неподвижно, а
вращается шкала (лимб), что позволяет, не меняя положение компаса, быстро
совмещать нулевое деление лимба с северным концом магнитной стрелки. Зеркало на
откидной крышке позволяет при визировании на предмет контролировать
ориентирование компаса и производить отсчет по лимбу. Очень удобен для
пользования разведчиков спортивный компас, стрелка которого помещена в
специальную жидкость, поэтому она быстро успокаивается и почти не колеблется при
движении.
Визирное приспособление неподвижно, а
вращается шкала (лимб), что позволяет, не меняя положение компаса, быстро
совмещать нулевое деление лимба с северным концом магнитной стрелки. Зеркало на
откидной крышке позволяет при визировании на предмет контролировать
ориентирование компаса и производить отсчет по лимбу. Очень удобен для
пользования разведчиков спортивный компас, стрелка которого помещена в
специальную жидкость, поэтому она быстро успокаивается и почти не колеблется при
движении. д., так как металл и электротоки будут влиять на показания
магнитной стрелки. Магнитное склонение не есть величина постоянная. Оно является
проявлением магнитных свойств Земли. На территории России оно изменяется в
довольно широких пределах. Более того, магнитное склонение даже для одной и той
же точки может быть различным, изменяясь из года в год. При движении группы по
азимуту необходимо тщательно выдерживать направление и чаще сверяться с
компасом. Для более точного выхода на ориентир не следует назначать очень
большие расстояния между точками поворота. В случае обхода препятствий на
противоположной стороне препятствия следует заметить какой-либо ориентир и,
обойдя препятствие, продолжать движение по азимуту из этого ориентира.
д., так как металл и электротоки будут влиять на показания
магнитной стрелки. Магнитное склонение не есть величина постоянная. Оно является
проявлением магнитных свойств Земли. На территории России оно изменяется в
довольно широких пределах. Более того, магнитное склонение даже для одной и той
же точки может быть различным, изменяясь из года в год. При движении группы по
азимуту необходимо тщательно выдерживать направление и чаще сверяться с
компасом. Для более точного выхода на ориентир не следует назначать очень
большие расстояния между точками поворота. В случае обхода препятствий на
противоположной стороне препятствия следует заметить какой-либо ориентир и,
обойдя препятствие, продолжать движение по азимуту из этого ориентира. В полдень Солнце всегда находится в направлении юга. Самая короткая тень от
местных предметов бывает в 13 часов, и направление тени от вертикально
расположенных местных предметов в это время будет указывать на север.
В полдень Солнце всегда находится в направлении юга. Самая короткая тень от
местных предметов бывает в 13 часов, и направление тени от вертикально
расположенных местных предметов в это время будет указывать на север. Став лицом к Полярной звезде, мы получим направление на север.
Став лицом к Полярной звезде, мы получим направление на север. Не дожидаясь
самой короткой тени можно ориентироваться следующим способом. Воткните в землю
палку около 1 метра длиной. Отметьте конец тени. Подождите 10-15 минут и
повторите процедуру. Проведите линию от первой позиции тени до второй и продлите
на шаг дальше второй отметки. Станьте носком левой ноги напротив первой отметки,
а правой — в конце линии, которую вы начертили. Сейчас вы стоите лицом на север.
Не дожидаясь
самой короткой тени можно ориентироваться следующим способом. Воткните в землю
палку около 1 метра длиной. Отметьте конец тени. Подождите 10-15 минут и
повторите процедуру. Проведите линию от первой позиции тени до второй и продлите
на шаг дальше второй отметки. Станьте носком левой ноги напротив первой отметки,
а правой — в конце линии, которую вы начертили. Сейчас вы стоите лицом на север. Алтари и часовни христианских и лютеранских церквей обращены
на восток, колокольни на запад. Опущенный край нижней перекладины креста на
куполе православной церкви обращен к югу, приподнятый — к северу. Алтари
католических костелов располагаются на западной стороне. Двери синагог и
мусульманских мечетей обращены примерно на север, их противоположные стороны
направлены: мечетей — на Мекку в Аравии, лежащую на меридиане Воронежа, а
синагог — на Иерусалим в Палестине, лежащий на меридиане Днепропетровска.
Кумирни, пагоды, буддийские монастыри фасадами обращены на юг. Выход из юрт
обычно делают на юг. В домах сельской местности больше окон в жилых помещениях
прорубается с южной стороны, а краска на стенах строений с южной стороны
выцветает больше и имеет жухлый цвет.
Алтари и часовни христианских и лютеранских церквей обращены
на восток, колокольни на запад. Опущенный край нижней перекладины креста на
куполе православной церкви обращен к югу, приподнятый — к северу. Алтари
католических костелов располагаются на западной стороне. Двери синагог и
мусульманских мечетей обращены примерно на север, их противоположные стороны
направлены: мечетей — на Мекку в Аравии, лежащую на меридиане Воронежа, а
синагог — на Иерусалим в Палестине, лежащий на меридиане Днепропетровска.
Кумирни, пагоды, буддийские монастыри фасадами обращены на юг. Выход из юрт
обычно делают на юг. В домах сельской местности больше окон в жилых помещениях
прорубается с южной стороны, а краска на стенах строений с южной стороны
выцветает больше и имеет жухлый цвет. Определив азимут, его значение необходимо разделить на 15 (величина поворота
Солнца за 1 час), полученное число будет указывать местное время в момент
отсчета. Например, азимут по Солнцу составляет 180°, значит время будет
составлять 12 часов.
Определив азимут, его значение необходимо разделить на 15 (величина поворота
Солнца за 1 час), полученное число будет указывать местное время в момент
отсчета. Например, азимут по Солнцу составляет 180°, значит время будет
составлять 12 часов.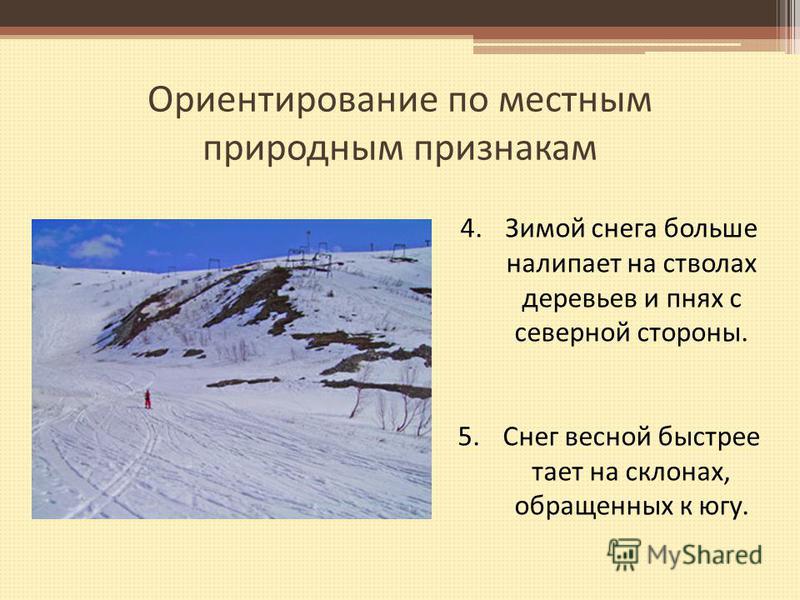 А значит, не обязательно с южной стороны. И если еще
учесть то, что на развитие кроны деревьев, а также на ширину прироста древесины
постоянно влияет направление ветров, влага, то вывод ясен. Но он не может быть
верным для всех районов страны. Исключением может быть Север, где тепла и света
от солнца значительно меньше, чем влаги, и где деревья развиваются лучше в
сторону юга.
А значит, не обязательно с южной стороны. И если еще
учесть то, что на развитие кроны деревьев, а также на ширину прироста древесины
постоянно влияет направление ветров, влага, то вывод ясен. Но он не может быть
верным для всех районов страны. Исключением может быть Север, где тепла и света
от солнца значительно меньше, чем влаги, и где деревья развиваются лучше в
сторону юга. Следует иметь в виду, что стволы
сосны покрываются вторичной коркой. С северной стороны эта корка образуется
значительно реже, чем с южной. А после дождя ствол сосны чернеет с севера. Это
объясняется тем, что вторичная корка, образующаяся на теневой стороне ствола и
заходящая по ней выше, чем по южной, во время дождя набухает и высыхает
медленно. Это и создает впечатление черного цвета северной стороны ствола сосны.
Стороны горизонта также можно определить по лиственным деревьям. Так, стволы
осин, а особенно тополя, с севера покрываются мхом и лишайниками. И даже если
лишайник разросся по всему дереву, то с северной стороны его больше, там он
более влажный и плотный. Это особенно хорошо заметно по нижней части ствола. А
кора белой березы с южной стороны всегда белее по сравнению с северной стороной.
Трещины и неровности, наросты покрывают березу с северной стороны. А учитывая,
что береза очень чувствительна к ветрам, наклон ее ствола также поможет
ориентироваться в лесу.
Следует иметь в виду, что стволы
сосны покрываются вторичной коркой. С северной стороны эта корка образуется
значительно реже, чем с южной. А после дождя ствол сосны чернеет с севера. Это
объясняется тем, что вторичная корка, образующаяся на теневой стороне ствола и
заходящая по ней выше, чем по южной, во время дождя набухает и высыхает
медленно. Это и создает впечатление черного цвета северной стороны ствола сосны.
Стороны горизонта также можно определить по лиственным деревьям. Так, стволы
осин, а особенно тополя, с севера покрываются мхом и лишайниками. И даже если
лишайник разросся по всему дереву, то с северной стороны его больше, там он
более влажный и плотный. Это особенно хорошо заметно по нижней части ствола. А
кора белой березы с южной стороны всегда белее по сравнению с северной стороной.
Трещины и неровности, наросты покрывают березу с северной стороны. А учитывая,
что береза очень чувствительна к ветрам, наклон ее ствола также поможет
ориентироваться в лесу.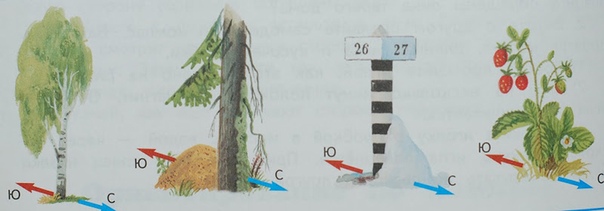
 На столбе на
пересечениях квадратов в верхней части цифры – нумерации противолежащего
квадрата. Ребро столба между двумя гранями с наименьшими цифрами показывает
направление на север. Нумерация кварталов в СНГ идет с запада на восток и далее
на юг. В больших массивах культурного леса определить стороны горизонта можно по
просекам, которые, как правило, прорубаются строго по линиям север-юг и
восток-запад, а также по надписям номеров кварталов на столбах, установленных на
пересечениях просек. На каждом таком столбе в верхней его части и на каждой из
четырех граней проставляются цифры — нумерация противолежащих кварталов леса;
ребро между двумя гранями с наименьшими цифрами показывает направление на север.
На столбе на
пересечениях квадратов в верхней части цифры – нумерации противолежащего
квадрата. Ребро столба между двумя гранями с наименьшими цифрами показывает
направление на север. Нумерация кварталов в СНГ идет с запада на восток и далее
на юг. В больших массивах культурного леса определить стороны горизонта можно по
просекам, которые, как правило, прорубаются строго по линиям север-юг и
восток-запад, а также по надписям номеров кварталов на столбах, установленных на
пересечениях просек. На каждом таком столбе в верхней его части и на каждой из
четырех граней проставляются цифры — нумерация противолежащих кварталов леса;
ребро между двумя гранями с наименьшими цифрами показывает направление на север. Способность человека оценивать на глаз без
помощи приборов, расстояния до окружающих его предметов и размеры предметов
называется глазомером. Это индивидуальная особенность человека, но ее можно
развить путем постоянных и терпеливых упражнений. Глазомерное определение
расстояний производится различными способами. Можно определять расстояние по
видимым деталям. Для более точного определения расстояния по видимым деталям
необходимо руководствоваться данными, приведенными в таблице.
Способность человека оценивать на глаз без
помощи приборов, расстояния до окружающих его предметов и размеры предметов
называется глазомером. Это индивидуальная особенность человека, но ее можно
развить путем постоянных и терпеливых упражнений. Глазомерное определение
расстояний производится различными способами. Можно определять расстояние по
видимым деталям. Для более точного определения расстояния по видимым деталям
необходимо руководствоваться данными, приведенными в таблице. К примеру, необходимо измерить расстояние до человека, идущего вдоль
реки по противоположному берегу. Для этого следует вытянуть руку по направлению
движения пешехода и смотреть одним правым глазом на конец пальца, ожидая, когда
человек заслонится им. И в тот же момент необходимо закрыть правый глаз и
открыть левый. Человек словно отскочит назад. Необходимо тотчас же считать,
сколько шагов сделает пешеход, прежде чем снова поравняется с пальцем вытянутой
руки исследователя. Расстояние от исследователя до человека на том берегу реки
определяется из пропорции: Д:Я =Л:Г, откуда Д=ПХ(Л:Р).
К примеру, необходимо измерить расстояние до человека, идущего вдоль
реки по противоположному берегу. Для этого следует вытянуть руку по направлению
движения пешехода и смотреть одним правым глазом на конец пальца, ожидая, когда
человек заслонится им. И в тот же момент необходимо закрыть правый глаз и
открыть левый. Человек словно отскочит назад. Необходимо тотчас же считать,
сколько шагов сделает пешеход, прежде чем снова поравняется с пальцем вытянутой
руки исследователя. Расстояние от исследователя до человека на том берегу реки
определяется из пропорции: Д:Я =Л:Г, откуда Д=ПХ(Л:Р).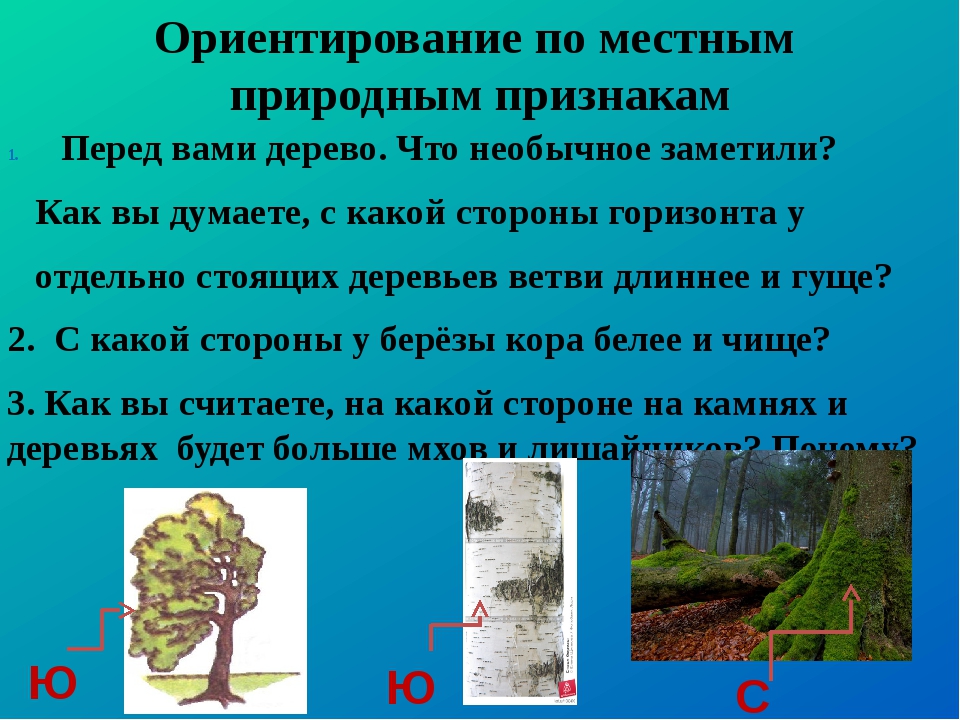 Это можно сделать с помощью
травинки. Для этого необходимо на противоположном берегу реки выбрать в
непосредственной близости от него два заметных предмета, и, стоя по другую
сторону реки с вытянутыми руками, в которых зажата травинка, следует закрыть
промежуток между выбранными предметами. Один глаз должен быть закрыт. После
этого следует, сложив травинку пополам, отходить от берега до тех пор, пока
расстояние между выбранными предметами не закроется сложенной травинкой. Замерив
промежуток между двумя точками стояния, получим расстояние до противоположного
берега, т. е. ширину реки.
Это можно сделать с помощью
травинки. Для этого необходимо на противоположном берегу реки выбрать в
непосредственной близости от него два заметных предмета, и, стоя по другую
сторону реки с вытянутыми руками, в которых зажата травинка, следует закрыть
промежуток между выбранными предметами. Один глаз должен быть закрыт. После
этого следует, сложив травинку пополам, отходить от берега до тех пор, пока
расстояние между выбранными предметами не закроется сложенной травинкой. Замерив
промежуток между двумя точками стояния, получим расстояние до противоположного
берега, т. е. ширину реки. Тогда ВБ :АБ=ДГ :АГ, откуда ДГ=АГ(ВБ : АБ), т. е.,
разделив длину покрытой тенью части палки на расстояние от нее до верхушки тени
дерева и помножив это число на длину тени, получим высоту предмета (дерева).
Высота предмета по своему росту определяется следующим образом. Необходимо
отойти от дерева на известное расстояние АД, лечь головой к точке А и ногами,
между которыми зажата палка, к дереву в точке В так, чтобы наш луч зрения
проходил через верх палки на вершину дерева. Тогда 5Д=ЛДХ Х( СВ-АВ).
Тогда ВБ :АБ=ДГ :АГ, откуда ДГ=АГ(ВБ : АБ), т. е.,
разделив длину покрытой тенью части палки на расстояние от нее до верхушки тени
дерева и помножив это число на длину тени, получим высоту предмета (дерева).
Высота предмета по своему росту определяется следующим образом. Необходимо
отойти от дерева на известное расстояние АД, лечь головой к точке А и ногами,
между которыми зажата палка, к дереву в точке В так, чтобы наш луч зрения
проходил через верх палки на вершину дерева. Тогда 5Д=ЛДХ Х( СВ-АВ). Для измерения его
необходимо согнуть под прямым углом к ладони. Если же палец короче 10 см, то его
длину необходимо записать и запомнить. В походе это понадобится;
Для измерения его
необходимо согнуть под прямым углом к ладони. Если же палец короче 10 см, то его
длину необходимо записать и запомнить. В походе это понадобится; Например: при росте 120 см длина шага будет равна —
120/4 +37=30+37=67 см.
Например: при росте 120 см длина шага будет равна —
120/4 +37=30+37=67 см. Совместив конец пальца с одним из предметов, следует
отметить, против чего находится другой конец пальца. Это и будет 10°. Затем,
перемещая палец по прямой и совмещая его конец с отмеченным местом, напротив
которого был перед этим изгиб пальца, находим новое место изгиба — тут
оканчиваются следующие 10°. Это уже 20° от начала. И так нужно дойти до второго
предмета, который ограничивает угол. Вполне возможно, что он ляжет где-то
посредине пальца. В этом случае важно на глаз определить, сколько десятых частей
пальца будет между его концом и визированным предметом. Это число целых градусов
надо будет прибавить к измеренным перед этим десяткам градусов. Например, палец
уложен целиком 3 раза, после чего осталось еще 4/10 его длины. Значит, два
предмета лежат под углом 2Г». Выполняя эту работу, нельзя менять положение руки
относительно корпуса тела и глаза. Необходимо вслед за пальцем медленно
поворачиваться корпусом.
Совместив конец пальца с одним из предметов, следует
отметить, против чего находится другой конец пальца. Это и будет 10°. Затем,
перемещая палец по прямой и совмещая его конец с отмеченным местом, напротив
которого был перед этим изгиб пальца, находим новое место изгиба — тут
оканчиваются следующие 10°. Это уже 20° от начала. И так нужно дойти до второго
предмета, который ограничивает угол. Вполне возможно, что он ляжет где-то
посредине пальца. В этом случае важно на глаз определить, сколько десятых частей
пальца будет между его концом и визированным предметом. Это число целых градусов
надо будет прибавить к измеренным перед этим десяткам градусов. Например, палец
уложен целиком 3 раза, после чего осталось еще 4/10 его длины. Значит, два
предмета лежат под углом 2Г». Выполняя эту работу, нельзя менять положение руки
относительно корпуса тела и глаза. Необходимо вслед за пальцем медленно
поворачиваться корпусом.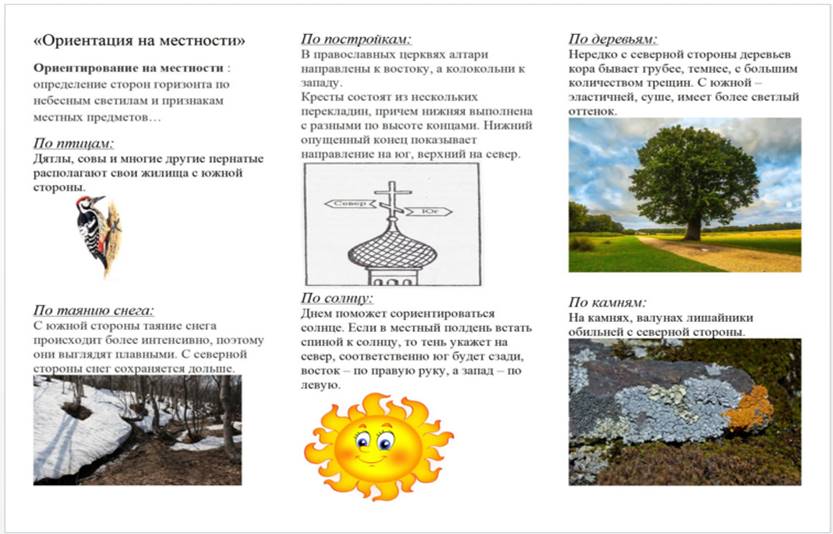 От конца большого пальца до конца мизинца, если держать вытянутую руку прямо
на уровне глаза и перпендикулярно к направлению зрения, — 22,5°. Этой мерой
можно пользоваться для измерения больших углов (от 45°).
От конца большого пальца до конца мизинца, если держать вытянутую руку прямо
на уровне глаза и перпендикулярно к направлению зрения, — 22,5°. Этой мерой
можно пользоваться для измерения больших углов (от 45°).
 Так, на высоте 2500 — 3500 м над уровнем моря скорость
движения уменьшается на 25%, выше 3500 — на 50%. При движении в распутицу, по
глинистому и солонцеватому грунту скорость замедляется на 50%, по кочковатому
лугу и по целине с густым травяным покровом — на 25%. Сильный встречный ветер с
густой пылью может снизить скорость ходьбы человека на 50%, ливень, метель — на
10 — 15%.
Так, на высоте 2500 — 3500 м над уровнем моря скорость
движения уменьшается на 25%, выше 3500 — на 50%. При движении в распутицу, по
глинистому и солонцеватому грунту скорость замедляется на 50%, по кочковатому
лугу и по целине с густым травяным покровом — на 25%. Сильный встречный ветер с
густой пылью может снизить скорость ходьбы человека на 50%, ливень, метель — на
10 — 15%.Ориентирование на местности и выход к населенным пунктам
Слайды и текст этой презентации
Слайд 1
Авторы:
Махоренко Вера Васильевна
Махоренко Ольга Викторовна
Государственное общеобразовательное учреждение
средняя общеобразовательная школа №268
Невского района города Санкт-Петербурга
Ориентирование на местности и выход к населенным пунктам
Слайд 2
Ориентироваться на местности — это значит определить свое местоположение и направления на стороны горизонта относительно окружающих местных предметов и форм рельефа, найти указанное направление движения и точно выдержать его в пути.
Сущность ориентирования составляют три элемента:
опознание местности, на которой мы находимся;
по известным ее признакам и местным предметам: определение своего местоположения;
отыскание направления движения на данной местности.
2
Ориентирование на местности
Слайд 3
По Солнцу.
По Полярной звезде.
По тени.
По таянию снега.
По Луне и часам.
По карте.
По компасу.
По Солнцу и часам.
По Луне.
По постройкам.
По местным предметам и признакам.
3
Способы ориентирования на местности
Слайд 4
Чтобы ориентироваться по карте на местности, надо прежде всего сориентировать карту и определить точку своего стояния.
Ориентирование карты по линиям местности. В этом случае необходимо выйти на дорогу (просеку, берег реки или другую линию), отыскать ее на карте и затем поворачивать карту до тех пор, пока направление дороги (линии) на карте не совпадет с направлением дороги (линии) на местности, затем проверить, чтобы предметы, расположенные справа и слева от дороги (линии), на местности находились с тех же сторон, что и на карте.
4
Ориентирование по карте
Слайд 5
Компасом нельзя пользоваться вблизи железных предметов, боевой техники и линий электропередачи, так как они вызывают отклонение магнитной стрелки.
применяется преимущественно на местности, затруднительной для ориентирования (в лесу, в пустыне, в тундре), а также при плохой видимости. В этих условиях компасом определяют направление на север, а затем карту поворачивают (направляют) верхней стороной рамки в сторону севера так, чтобы вертикальная линия координатной сетки карты совпадала с продольной осью магнитной стрелки компаса.
5
Ориентирование карты по компасу
Слайд 6
север – С (норд –N),
юг – Ю (зюйд Z) или S,
запад – З (вест – W),
восток – В (ост – О) или EST – Е.
Различают 4 основные стороны горизонта, их обозначают начальными буквами :
(В скобках даны морские названия сторон горизонта, которые попали в Россию благодаря Петру I из Голландии.)
Заключается в определении сторон горизонта (направлений на север, восток, юг, запад) и своего местонахождения на местности относительно назначенных (выбранных) ориентиров и применяется обычно на ограниченной территории.
6
Ориентирование без карты
Слайд 7
взаимосвязаны между собой, и, если известно хотя бы одно из них, можно определить остальные. В противоположном направлении по отношению к северу будет юг, справа-восток, а слева — запад.
Взаимное положение сторон горизонта
Определить стороны горизонта можно магнитным компасом — стрелка темным (синим) концом показывает на север.
North
South
West
East
север – С (норд –N),
юг – Ю (зюйд Z) или S,
запад – З (вест – W),
восток – В (ост – О) или EST – Е.
7
Направления на стороны горизонта
Слайд 8
В северном полушарии места восхода и захода Солнца по временам года следующее:
Время года Солнце восходит Солнце заходит
Зимой на юго-востоке на юго-западе
Летом на северо-востоке на северо-западе
Весной Осенью на востоке на западе
Для более точного определения сторон горизонта по Солнцу используются наручные часы.
Можно рассчитать и промежуточное положение солнца по отношению к сторонам горизонта.
в 7 часов утра на востоке
в 1 час дня (13.00) приблизительно на юге
в 7 часов вечера (19.00) на западе
В средних широтах летом Солнце :
В зимнее время солнце в 10 часов утра находится на юго-востоке, в 16 часов дня на юго-западе, а в 22 часа на северо-западе.
В час ночи солнца уже не видно, поэтому ориентиром служит наиболее освещенная часть горизонта.
8
По Солнцу
Слайд 9
Определение сторон горизонта по Солнцу и часам.
а – до 13 часов;
б – после 13 часов
Встать лицом к Солнцу.
Положить часы.
Направить часовую стрелку на солнце.
Угол между часовой стрелкой и цифрой «1» по зимнему времени или на «2» по летнему времени (только для территории СНГ) на циферблате нужно разделить пополам.
Полученная линия и будет направлением «север – юг». При этом юг всегда в той стороне, где солнце было или будет в середине дня.
При этом надо:
9
По Солнцу и часам
Слайд 10
Полярная звезда всегда находится на севере. Чтобы найти Полярную звезду, надо сначала найти созвездие Большой Медведицы, напоминающее ковш, составленный из семи довольно ярких звезд. Затем через две крайние правые звезды Большой Медведицы мысленно провести линию, на которой отложить пять раз расстояние между этими крайними звездами, и тогда в конце этой линии найдем Полярную звезду, которая, в свою очередь, находится в хвосте другого созвездия, называемого Малой Медведицей. Став лицом к Полярной звезде, мы получим направление на север.
Чтобы найти Полярную звезду, надо сначала найти созвездие Большой Медведицы, напоминающее ковш, составленный из семи довольно ярких звезд. Затем через две крайние правые звезды Большой Медведицы мысленно провести линию, на которой отложить пять раз расстояние между этими крайними звездами, и тогда в конце этой линии найдем Полярную звезду, которая, в свою очередь, находится в хвосте другого созвездия, называемого Малой Медведицей. Став лицом к Полярной звезде, мы получим направление на север.
10
По Полярной звезде
Слайд 11
в последнюю четверть Луна
в первую четверть Луна
Стороны света Первая четверть
(видна, правая половина диска Луны) Полнолуние
(виден весь диск Луны) Последняя четверть
(видна левая половина диска Луны)
На востоке — 19 часов 01 час (ночи)
На юге 19 часов 01 час (ночи) 07 часов (утра)
На западе 01 час (ночи) 07 часов (утра) —
в 1час ночи — на востоке
в 7часов утра — на юге
в 19 часов находится на юге
в 1час ночи — на западе
Для приблизительного ориентирования нужно знать, что летом
11
По Луне
Слайд 12
(прибывает или убывает), то нужно:
При полнолунии ночью стороны горизонта определяются так же, как по Солнцу и часам, причем Луна принимается за Солнце.
разделить на глаз радиус диска Луны на шесть равных частей, определить, сколько таких частей содержится в поперечнике видимого серпа Луны, и заметить по часам время;
из этого времени вычесть (если Луна прибывает) или прибавить (если Луна убывает) столько частей, сколько содержится в поперечнике видимого серпа Луны. Полученная сумма или разность покажет час, когда в том направлении, где находится Луна, будет находиться Солнце;
направить на Луну то место на циферблате, которое соответствует полученному после сложения или вычитания времени. Биссектриса угла между направлением на Луну и на час (по зимнему времени) или на два часа (по летнему времени) покажет направление на юг.
+
Стареет
-
Растет
12
Если Луна неполная
Слайд 13
В полдень направление тени (она будет самая короткая) указывает на север.
Не дожидаясь самой короткой тени можно ориентироваться следующим способом:
Воткните в землю палку около 1 метра длиной.
Отметьте конец тени. Подождите 10-15 минут и повторите процедуру.
Проведите линию от первой позиции тени до второй и продлите на шаг дальше второй отметки.
Станьте носком левой ноги напротив первой отметки, а правой — в конце линии, которую вы начертили. Сейчас вы стоите лицом на север.
Подождите 10-15 минут и повторите процедуру.
Проведите линию от первой позиции тени до второй и продлите на шаг дальше второй отметки.
Станьте носком левой ноги напротив первой отметки, а правой — в конце линии, которую вы начертили. Сейчас вы стоите лицом на север.
13
По тени
Слайд 14
Производится в сочетании с другими способами. В основе его лежит знание следующих признаков:
Определение сторон горизонта по различным местным признакам менее надежно, чем по небесным светилам. Поэтому пользоваться ими надо осторожно, проверяя результаты разными способами. Этих способов ориентирования очень много.
14
Определение сторон горизонта по местным предметам
Слайд 15
Смола больше выступает на южной половине ствола хвойного дерева.
Кора большинства деревьев на северной стороне грубее и темнее на северной стороне, тоньше и эластичнее (у березы светлее) — на южной.
15
По смоле и коре
Слайд 16
Береза прекрасный помощник.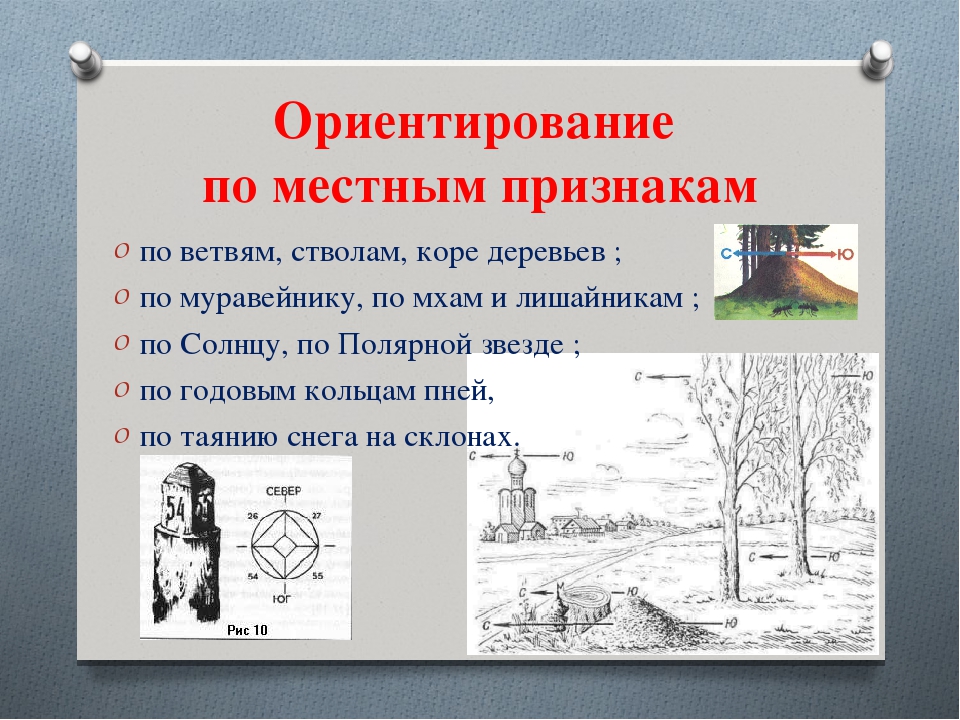 Это дерево очень светолюбиво. Ее кора всегда белее и чище с южной стороны. Причем это настолько заметно, что по ней можно ориентироваться даже в глубине леса.
Это дерево очень светолюбиво. Ее кора всегда белее и чище с южной стороны. Причем это настолько заметно, что по ней можно ориентироваться даже в глубине леса.
Трещины и неровности, наросты покрывают березу с северной стороны.
Береза очень чувствительна к ветрам, наклон ее ствола также поможет ориентироваться в лесу.
16
Береза
Слайд 17
Их северная сторона покрыта лишайниками и мхом, которые не любят тепла и света.
Почва возле такого камня поможет, если отсутствуют лишайники и мох: почва с северной стороны такого камня более влажная, чем с южной.
С северной стороны деревья, камни, деревянные, черепичные и шиферные кровли раньше и обильнее покрываются лишайниками, грибками.
17
По крупным камням и валунам
Слайд 18
Стволы деревьев (осин, берез, а особенно тополя), с севера покрываются мхом и лишайниками. И даже если лишайник разросся по всему дереву, то с северной стороны его больше, там он более влажный и плотный. Это особенно хорошо заметно по нижней части ствола.
Мхи и лишайники не любят тепло и свет, а поэтому они всегда растут с теневой стороны. Значит, там, где мох и лишайник,— северная сторона.
18
По мхам и лишайникам
Слайд 19
Грибы предпочитают расти с северной стороны дерева, пня, кустарника.
19
По грибам
Слайд 20
После дождя ствол сосны чернеет с севера. Это объясняется тем, что вторичная корка, образующаяся на теневой стороне ствола и заходящая по ней выше, чем по южной, во время дождя набухает и высыхает медленно. Это и создает впечатление черного цвета северной стороны ствола сосны.
У сосны вторичная (бурая, потрескавшаяся) кора на северной стороне ствола поднимается выше, чем на южной.
20
По стволу сосны
Слайд 21
У отдельно стоящих деревьев кроны пышнее и гуще с южной стороны.
По отдельно стоящему дереву ориентируются следующим образом: с северной стороны меньше ветвей, чем с южной, солнечной стороны. Однако, этот способ неточен, так как надо учитывать направление постоянно дующих ветров.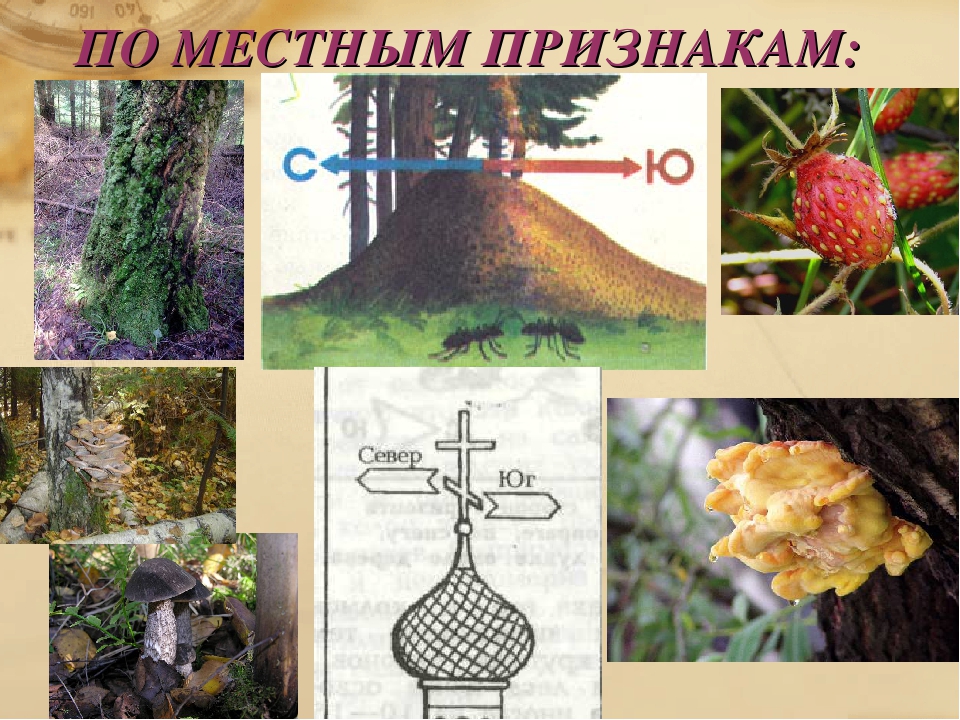
Ветви деревьев, как правило, более развиты, гуще и длиннее с южной стороны; годичные кольца на пне спиленного дерева шире с южной стороны и уже с северной. И даже стволы некоторых деревьев наклонены к югу.
Годовые кольца на свежих пнях деревьев расположены гуще с северной стороны, а шире со стороны, лучше освещенной солнцем, т.е. с южной. Но ветры могут исказить картину.
21
По годовым кольцам
Слайд 22
Никогда не используй один признак – сравни несколько.
Указание на то, что крона деревьев с южной стороны роскошнее, а годичные кольца прироста древесины на пне срезанного дерева с юга шире, чем с севера, не всегда подтверждается.
Не доверяй кронам деревьев и годичным кольцам!
22
ВНИМАНИЕ !
Слайд 23
Южная сторона предметов нагревается больше, чем северная. Соответственно таяние снега с этой стороны происходит быстрее. Это хорошо видно ранней весной и во время оттепелей зимой на склонах оврагов, лунках у деревьев, снегу, прилипшему к камням.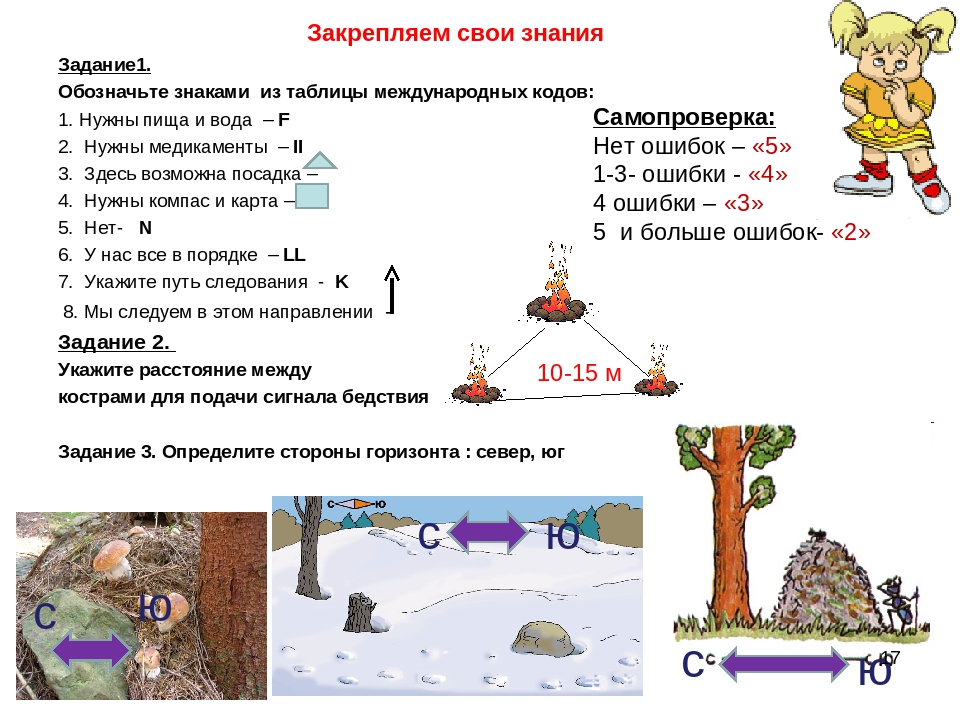
Снег быстрее подтаивает на южных склонах, в результате подтаивания на снегу образуются зазубрины (шипы), направленные на юг.
Летом почва около больших камней, строений, деревьев и кустов более сухая с южной стороны, что можно определить на ощупь.
23
По таянию снега
Слайд 24
Различные (лесные) плоды в период созревания приобретают раньше окраску с южной стороны. Значит, север будет в противоположной стороне.
Они раньше краснеют (желтеют) с южной стороны.
На лесной поляне ягоды (земляника, брусника, черника, голубика) начинают вызревать со стороны солнечного света. Головки всем известных растений — подсолнечника и череды всегда повёрнуты к солнцу. Эти растения очень светолюбивы, поэтому, если даже солнце скрыто за облаками, они всё равно «смотрят» в его сторону: на восток (7-8 часов), на юг (в 13-14 часов), на запад (19-20 часов).
24
По ягодам и фруктам
Слайд 25
В летнее время на южной стороне она более густая, чем на северной. А при длительной жаре остается более зеленой с северной стороны.
С северной стороны дольше сохраняется зеленый цвет травы, когда она начинает желтеть.
А при длительной жаре остается более зеленой с северной стороны.
С северной стороны дольше сохраняется зеленый цвет травы, когда она начинает желтеть.
Весной трава на теневых северных окраинах полян более густая, чем на южных. Но с южной стороны отдельных камней, построек, опушек леса она весной выше и гуще.
25
По травянистому покрову в лесу
Слайд 26
Муравьи любят тепло и устраивают свои жилища с южной стороны дерева, пня, камня или куста. Они делают южный склон муравейника более пологим, чем северный.
Белка устраивает свое жилище только в дуплах, расположенных с противоположной стороны господствующих ветров.
26
По белкам и муравьям
Слайд 27
весной — на север,
осенью — на юг.
Они летят:
27
По перелетным птицам
Слайд 28
Трехпалые чайки, или моевки, гнездятся по скалам многочисленными стаями, причем их гнезда всегда расположены на западных и северо-западных берегах островов.
28
По моевкам
Слайд 29
Болотная сова
Некоторые птицы совершают свои перелеты при безоблачном небе и когда ветер дует с юга.
Камышница (водяная курочка) – у взрослых красный клюв.
Перепелки
Кулики
29
По перелетам птиц
Горлица (кольчатая — слева, пятнистая – справа)
Каравайка
Вяхирь (витютень) — самый крупный европейский голубь.
Слайд 30
Сирийский поползень устраивает гнездо на стене скалы, всегда обращенной на восток.
30
По гнездам сирийского поползня
Слайд 31
Ласточки устраивают свои гнезда под карнизами домов с северной стороны.
31
По гнездам ласточек
Слайд 32
Поэтому у отдыхающих бабочек, как правило, сложенные крылья, бывают направлены:
рано утром —- к востоку
в полдень —- к югу
вечером —- к западу
Когда бабочка садится отдыхать, то обычно складывает крылья, инстинктивно выбирая такое положение, чтобы солнце светило на нее строго вниз, тогда тень от крыльев превращается в узкую линию. Если бабочка долго сидит на одном месте и переместившееся солнце начинает светить ей в бок, то она меняет положение, поворачивает крылья узким краем к солнцу.
32
По бабочкам
Слайд 33
Степные пчелы строят свои жилища из очень прочного материала. Их гнезда помещаются на камнях или на стенах, обращенных всегда к югу, и похожи на комки грязи, отброшенные колесами повозок или лошадиными копытами.
33
По гнездам степных пчел
Слайд 34
Несмотря на то, что повадки некоторых насекомых и животных служат признаками для определения сторон горизонта, здесь требуется более осторожный подход, чем при ориентировании по растениям.
34
Будьте осторожны
Слайд 35
Своеобразным ориентиром могут служить также интересные растения компасы: в Северной Америке — сильфиум, а в Средней и Южной Европе — латук, или дикий салат.
Латук (дикий салат)
Сильфиум
В степной местности трудно ориентироваться, но все же возможно. Так, например, грызуны, как правило, вход в свое жилище делают с южной стороны.
35
латук
сильфиум
1,3 — вид с востока;
2,4 — вид с юга
Растения компасы
Слайд 36
Латук (дикий салат) — двухлетний сорняк с корзинками желтых цветов и вертикально расположенными листьями.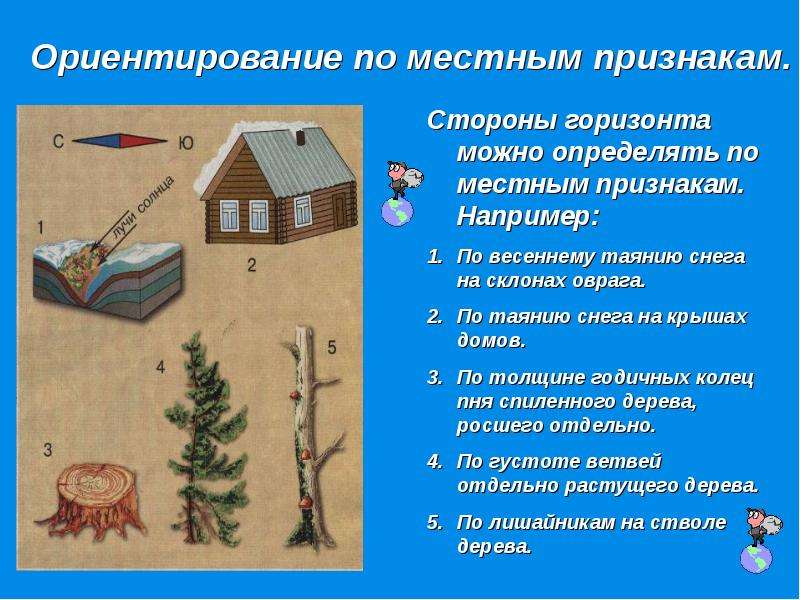 Если латук растет на влажных или затененных местах, то листья его на стебле располагаются во все стороны и служить ориентиром не могут. Если латук растет на сухом или открытом, незатененном месте, то листья его на стебле обращены плоскостями на запад и восток, а ребрами — на север и юг и служат прекрасным ориентиром, за что растение получило название «Степной компас».
Если латук растет на влажных или затененных местах, то листья его на стебле располагаются во все стороны и служить ориентиром не могут. Если латук растет на сухом или открытом, незатененном месте, то листья его на стебле обращены плоскостями на запад и восток, а ребрами — на север и юг и служат прекрасным ориентиром, за что растение получило название «Степной компас».
36
Латук или дикий салат
Слайд 37
Подсолнух тоже отличный помощник при ориентировании. Дело в том, что это теплолюбивое растение и его шляпки при цветении всегда повернуты в одном направлении — к солнцу.
В 6—7 часов утра шляпки всегда обращены на восход солнца — к востоку.
С 12 часов дня — строго на юг.
Вечером с 18 до 21 часа на закат солнца — к западу.
Этот цикл повторяется и в пасмурную погоду. Все это относится только к маленьким бутонам (завязям шляпок). Распустившиеся, а тем более уже созревшие шляпки подсолнечника находятся примерно в одном положении — на восток или юго-восток.
37
Подсолнух
Слайд 38
Многим это растение помнится своими острыми семенами (семянками), цепляющимися за одежду. Клиновидные сплюснутые семянки снабжены двумя зазубренными щетинками на широком конце. Не просто очиститься от них.
Череда – очень светолюбивое растение, предпочитает освещенные места. В течение дня ее «цветы» (корзинки) следят за движением солнца и все время поворачиваются в его сторону. Даже когда солнце спряталось за тучу, череда неизменно обращена к невидимому для нас светилу. Вот почему, зная точное время, можно определить расположите сторон света. Скажем, сейчас 17 часов. Летом в средней полосе солнце в 6 часов находится на востоке, в 14 часов – на юге, в 20 часов – на западе. Следовательно, в 17 часов «цветки» череды будут обращены на юго-запад.
38
Череда трехраздельная
Слайд 39
В больших массивах культурного леса определить стороны горизонта можно по просекам, которые, как правило, прорубаются строго по линиям север-юг и восток-запад, а также по надписям номеров кварталов на столбах, установленных на пересечениях просек. На каждом таком столбе в верхней его части и на каждой из четырех граней проставляются цифры — нумерация противолежащих кварталов леса; ребро между двумя гранями с наименьшими цифрами показывает направление на север. Нумерация кварталов в СНГ идет с запада на восток и далее на юг.
На каждом таком столбе в верхней его части и на каждой из четырех граней проставляются цифры — нумерация противолежащих кварталов леса; ребро между двумя гранями с наименьшими цифрами показывает направление на север. Нумерация кварталов в СНГ идет с запада на восток и далее на юг.
39
По просекам
Слайд 40
К постройкам, которые довольно строго ориентированы по сторонам горизонта, относятся церкви, мечети, синагоги, гробницы, египетские пирамиды.
Алтари и часовни христианских и лютеранских церквей обращены на восток, колокольни на запад.
Алтари католических костелов располагаются на западной стороне.
Костел Св. Михаила Архангела. Беларусь, д. Михалишки, построен в 17-ом веке (бывший монастырь августинцев)
Балаклава. Церковь 12 Апостолов
40
По постройкам
Слайд 41
Опущенный край нижней перекладины креста на куполе православной церкви обращен к югу, приподнятый — к северу.
Церковь Петра и Павла, г.Мценск (основан в 1147 г. ). Орловская обл.
). Орловская обл.
«Спас на крови» (Храм Воскресения Христова) (СПб)
41
По кресту
Слайд 42
Пагода
Образ Священной Горы как центра мира и мировой оси. Ее ярусы символизируют ступени восхождения на Небеса, а их уменьшающиеся размеры — движение вверх, в бесконечное и безграничное пространство. Считается, что само слово pagoda взято из персидского языка, в котором означает дом идолов, или происходит от слова дагоба или ступа в том значении, которое оно приобрело в буддизме Тхеравады.
Малая пагода диких гусей в Сиане
Большая пагода диких гусей в Сиане
Кумирня в Исэ.
Синтоистская кумирня
42
По кумирням, пагодам и буддийским монастырям
Их фасады обращены на юг.
Слайд 43
Двери еврейских синагог и мусульманских мечетей обращены примерно на север, их противоположные стороны направлены: мечетей — на Мекку в Аравии, лежащую на меридиане Воронежа,
а синагог — на Иерусалим в Палестине, лежащий на меридиане Днепропетровска.
Флорентийская синагога и Еврейский Музей.
Еврейская Синагога
Мечеть Харам Бейт-Уллах в Мекке.
Тадж-Махал — памятник скорби и любви — жемчужина индийской архитектуры..
43
По синагогам и мечетям
Слайд 44
В домах сельской местности больше окон в жилых помещениях прорубается с южной стороны, а краска на стенах строений с южной стороны выцветает больше и имеет жухлый цвет.
Выход из юрт обычно делают на юг.
44
По юртам и домам
Слайд 45
Ориентироваться на местности, это значит найти направления на …………………(север, юг, восток и запад) и определить свое……………………………..
стороны света
местонахождение
Для отыскания направления по сторонам света вначале определяют направление……………….; после чего, став лицом к северу, определяющий будет иметь направо -……………, налево -……………
север-юг
восток
запад
Стороны света обыкновенно находят по…………….., а при отсутствии его — по Солнцу, Луне, звездам и по некоторым признакам местных предметов.
компасу
Задание 1
45
Слайд 46
Задание 2
46
Поясните рисунки.
Слайд 47
47
Домашнее задание.
Определите, в каком направлении от нашей школы находятся почта, универсам Невский, станции метро проспект Большевиков и улица Дыбенко.
1. В каком направлении двигалась группа туристов, если Полярную звезду они видели справа от себя?
2. В каком направлении течет река Оккервиль?
Задание 3
Слайд 48
48
http://goup32441.narod.ru//lusana.ru/files/vt/003_oporn_konspekt/t2z1.htm
http://sezonoxoti.ru/view_sovet.php?id=1
http://worldweapon.ru/topograf/orient.php
http://super-map.ru/orientirovanie/orientirovanie-na-mestnosti-bez-karty.html
http://gimsyaroslavl.narod.ru/Rescuer/Rescuers_Guidebook/ch43_orientir.htm
http://borus.edusite.ru/p28aa1.html
http://www.finalnews.ru/podruchnie-sredstva/orientirovanie-na-mestnosti.html
Интернет-ресурсы:
Литература:
Смирнов А.Т., Хренников Б. О. Основы Безопасности жизнедеятельности. 6 класс. – М.: Просвещение, 2008
Беляков М. Ф. Ориентирование на местности без карты. – М.: Воениздат, 1955
Ильин Андрей. Школа выживания в природных условиях. – М.: Эксмо, 2003
Уилсон Н. Руководство по ориентированию на местности: Выбор маршрута и планирование путешествия. Навигация с помощью карт, компаса и природных объектов. Нейл Уилсон. Пер. с англ. К Ткаченко. – М.: ФАИР ПРЕСС, 2004.
О. Основы Безопасности жизнедеятельности. 6 класс. – М.: Просвещение, 2008
Беляков М. Ф. Ориентирование на местности без карты. – М.: Воениздат, 1955
Ильин Андрей. Школа выживания в природных условиях. – М.: Эксмо, 2003
Уилсон Н. Руководство по ориентированию на местности: Выбор маршрута и планирование путешествия. Навигация с помощью карт, компаса и природных объектов. Нейл Уилсон. Пер. с англ. К Ткаченко. – М.: ФАИР ПРЕСС, 2004.
Источники
5) .Ориентирование на местности по природным признакам и местным предметам.
В
лесу определить
стороны горизонта можно по лесоустроительным
признакам (просекам, квартальным
столбам). Просеки прорубаются в направлении
с севера на юг и с запада на восток. В
местах пересечения просек устанавливаются
квартальные столбы, на которые наносятся
цифры с указанием номера квартала. Грань
между двумя наименьшими цифрами всегда
ориентирована на север. Надежным
ориентиром в лесу являются зарубки на
стволах деревьев. Они
наносятся на высоте груди человека, с
правой стороны от тропы (дороги).
Наличие на дереве нескольких зарубок
является свидетельством близости дороги
или стоянки. Направление
сторон горизонта можно определить по
расположению церковного алтаря. В
православных церквах он всегда находится
на восточной стороне, а в католических
костелах — на западной стороне. Кресты
на крышах ориентированы в направлении
«север-юг». Приподнятый конец нижней
перекладины креста ориентирован на
север. Могилы ориентированы с запада
на восток, при этом крест устанавливается
с восточной стороны и ориентирован с
севера на юг. Приближенно
судить о расположении сторон горизонта
можно по местным признакам. Кора
отдельно стоящих деревьев покрыта
мхом с северной стороны. Кора берез
светлее, имеет меньше темных пятен и
трещин с южной стороны. Весной снег
быстрее тает с южной стороны. Муравейники
и гнезда пчел расположены с южной
стороны деревьев и камней.
Надежным
ориентиром в лесу являются зарубки на
стволах деревьев. Они
наносятся на высоте груди человека, с
правой стороны от тропы (дороги).
Наличие на дереве нескольких зарубок
является свидетельством близости дороги
или стоянки. Направление
сторон горизонта можно определить по
расположению церковного алтаря. В
православных церквах он всегда находится
на восточной стороне, а в католических
костелах — на западной стороне. Кресты
на крышах ориентированы в направлении
«север-юг». Приподнятый конец нижней
перекладины креста ориентирован на
север. Могилы ориентированы с запада
на восток, при этом крест устанавливается
с восточной стороны и ориентирован с
севера на юг. Приближенно
судить о расположении сторон горизонта
можно по местным признакам. Кора
отдельно стоящих деревьев покрыта
мхом с северной стороны. Кора берез
светлее, имеет меньше темных пятен и
трещин с южной стороны. Весной снег
быстрее тает с южной стороны. Муравейники
и гнезда пчел расположены с южной
стороны деревьев и камней. Весной
караваны птиц летят с юга на север, а
осенью в обратном направлении. Камни,
скалы, деревянные, шиферные, черепичные
крыши обычно покрываются мхом с северной
стороны. На деревьях хвойных пород смола
выделяется и накапливается больше с
южной стороны. Ягоды и фрукты в период
созревания приобретают окраску зрелости
сначала с южной стороны.
Весной
караваны птиц летят с юга на север, а
осенью в обратном направлении. Камни,
скалы, деревянные, шиферные, черепичные
крыши обычно покрываются мхом с северной
стороны. На деревьях хвойных пород смола
выделяется и накапливается больше с
южной стороны. Ягоды и фрукты в период
созревания приобретают окраску зрелости
сначала с южной стороны.
БИЛЕТ №5
1 Травматическая ампутация конечности. П.П
П.П Наложения жгута. стерильной повязки, холод. Оторванную часть конечности завернуть в пленку или пакет полителеновый снова обернуть ее в марлю затем поместить в полителеновый мешок наполненный холодом и в подвешенном состояние транспортируют.
2 Признаки открытого и закрытого пнрнлома костей конечностей. Правило оказания п.П
Это полное и частичное повреждения костей, которое сопровождается нарушением ее целостности.
ОТКРЫТЫЕ- нарушается целостность мягких тканей.
ЗАКРЫТЫЕ- без повреждения кожи и кож.покровов.
ПРИЗНАКИ; боль,
припухлостьи деформация в области
травмы, укорочения и искривления
конечности, патологическая подвижность
кости в месте перелома.
П.П наложения шины, холод. Доставка в леч.учережд.
При открытом переломе на рану наложить стер. повязку, при кровотечении остановка (наложения жгута).
3 Аутотренинг — метод самореабилитации (самовнушение). Это умение снимать усталость, переутомления, заключается в себе, расслабления всего тела по очереди.
Для выполнения упражнения нужно принять максимально удобную для расслабления позу:
«лежа» — голова на низкой подушке, руки согнуты в локтях и свободно лежат вдоль туловища ладонями вверх;
«полулежа» — сидя в кресле, откинуться на спинку, руки лежат на подлокотниках, ноги свободно расставлены;
«поза кучера» — сидя в кресле опустить голову, согнуть спину, положить руки на бедра так, чтобы они свободно свисали, расставить ноги.
Ориентирование по компасу и местным признакам — 3 класс — Человек и мир — Каталог статей
Ориентироваться можно:
по компасу
по солнцу
по луне и звездам
по местным признакам
по природным объектам
Знание самых распространенных способов ориентирования поможет вам определить расположение на местности нужных объектов. Важно знать и уметь определять стороны горизонта!
Важно знать и уметь определять стороны горизонта!
ОРИЕНТИРОВАНИЕ ПО КОМПАСУ
ОРИЕНТИРОВАНИЕ ПО СОЛНЦУ
ОРИЕНТИРОВАНИЕ ПО ЗВЁЗДАМ
ОРИЕНТИРОВАНИЕ ПО ПРИРОДНЫМ ПРИМЕТАМ
По деревьям:
— Кора деревьев грубее и темнее с северной стороны.
— У деревьев северная сторона покрыта мхом или лишайником.
— Смола на коре деревьев накапливается с южной стороны.
«Живые ориентиры»
Земляника своей красной стороной смотрит на юг, на солнце.
Грибы предпочитают расти с северной стороны пней и деревьев.
Цветы отслеживают положение солнца, даже если оно закрыто облаками. Но надо принимать во внимание ветер, который может повернуть растение.
Ориентирование по строениям
Опущенный край нижней перекладины креста на куполе православной церкви обращен на юг, приподнятый конец нижней перекладины указывает на север.
Как определить стороны света.
Как пользоваться компасом
Как ориентироваться на местности
ТЕСТ «ОРИЕНТИРОВАНИЕ НА МЕСТНОСТИ»
1. Куда направлена тень, падающая от предметов, в полдень?
2. В какой стороне горизонта находится солнце в полдень?
3. Как следует построить леснику свою избушку, чтобы солнце во время заката освещало крыльцо?
4. Какой склон муравейника обращён к югу: более пологий или более крутой?
Какой склон муравейника обращён к югу: более пологий или более крутой?
5. Как по стволу сосны определить северную сторону?
6. Двое друзей оказались во время дождя в лесу. Они заблудились, но знали, что выходить им нужно на север. Как только закончился дождь, решили выбираться из леса. Все деревья вокруг стояли мокрые. Один мальчик решил сориентироваться с помощью компаса, другой — по стволу сосны. В итоге они пошли в разные стороны. Кто из мальчиков выйдет из леса раньше? Почему?
7. С какой стороны кора берёзы светлее: с северной или с южной?
8. Правда ли, что мхи и лишайники сильнее покрывают основание ствола с южной стороны?
9. Если в полдень стать спиной к солнцу, какая сторона горизонта будет слева: запад или восток?
10. Если синий конец стрелки компаса указывает на север, куда указывает красный конец стрелки?
Пространственная ориентация — обзор
4 Интеграция сенсорной информации, связанной с движением
Несколько сенсорных систем, а именно зрительная, вестибулярная, проприоцептивная и слуховая, способствуют поддержанию пространственной ориентации. В принципе можно сказать, что все стереосистемы, реагирующие на движение в трехмерном пространстве, в той или иной степени вовлечены в интегративный процесс в центральных вестибулярных ядрах. Этот мультисенсорный поток информации необходим для скоординированного движения в пространстве.Афферентные нервные волокна от каждой из названных сенсорных систем сходятся к нервным клеткам вестибулярных ядер. Это означает, например, что восприятие движения в вестибулярной области коры головного мозга (теменно-островковая вестибулярная кора, PIVC) вызывается реальным движением или просмотром движущегося поля зрения.
В принципе можно сказать, что все стереосистемы, реагирующие на движение в трехмерном пространстве, в той или иной степени вовлечены в интегративный процесс в центральных вестибулярных ядрах. Этот мультисенсорный поток информации необходим для скоординированного движения в пространстве.Афферентные нервные волокна от каждой из названных сенсорных систем сходятся к нервным клеткам вестибулярных ядер. Это означает, например, что восприятие движения в вестибулярной области коры головного мозга (теменно-островковая вестибулярная кора, PIVC) вызывается реальным движением или просмотром движущегося поля зрения.
Можно поиграть с этим явлением, глядя на быстро текущую реку с моста или наблюдая за облаками в ветреный день, лежа на лугу. Проходит около 20 секунд, пока создается впечатление, что вода или облака, соответственно, стоят на месте, а наблюдатель движется.Этот эффект связан с тем, что, когда различная сенсорная информация сходится в одной клетке, на этом уровне невозможно отличить оптическую стимуляцию от вестибулярной.
Визуальное или оптическое восприятие движения в основном опосредуется периферическим полем сетчатки. Таким образом, более высокая интенсивность достигается при стимуляции всего поля зрения. Для клинических испытаний используется полосатый узор или другое сильно контрастирующее изображение (например, широкоформатная проекция горизонта города), движущиеся с угловой скоростью до 90 градусов -1 .Это известно как «оптокинетическая стимуляция».
У человека есть второй компонент оптической системы восприятия движения, который необходимо учитывать. Это опосредуется центральной областью сетчатки, известной как ямка, которая обеспечивает сфокусированное изображение с высоким разрешением. Афферентная информация из этой области передается в вестибулярные ядра отдельными путями. Клиническая стимуляция фовеа выполняется более медленно движущимися объектами (<40degs –1 ), обычно с помощью видимых точечных целей или маятника.
Заболевания головного мозга, поражающие любую из описанных систем, обычно вызывают нарушения пространственного восприятия или ориентации.
Соматосенсорное восприятие движения или силы тяжести происходит от рецепторов, распределенных по всему телу, даже из кишечника. Нейронная информация от этих рецепторов передается либо напрямую, либо через мшистые или лазящие волокна к клеткам Пуркинье в мозжечке и, в свою очередь, через тормозящие связи к вестибулярным ядрам.
Тяготение ощущается рецепторами подошвенной поверхности стопы в вертикальном положении, датчиками на спине в положении лежа или при ускорении в автомобиле.Можно почувствовать изменение силы тяжести с рецепторами в кишечнике, например когда канатная дорога проходит через столб.
Основные сенсорные входы, сходящиеся к клеткам вестибулярных ядер, исходят от зрительных, вестибулярных и соматосенсорных рецепторов. Когда мы активно перемещаемся в нашей среде обитания, все эти компоненты хорошо согласованы и согласуются с правильным сенсорным восприятием. Однако ситуация может сильно отличаться во время пассивного движения, когда сенсорные входы больше не обязательно совпадают правильно, то есть возникает сенсорное несоответствие.
Такое сенсорное несоответствие может испытать пассажир автомобиля, который, проезжая по холмистой и извилистой дороге, одновременно читает газету. Оптическая система покажет, что человек неподвижен (стабильное изображение газеты), в то время как вестибулярная система, соматосенсорная и акустическая системы будут указывать на движение транспортного средства. Такая же ситуация происходит в самолете. Кабина самолета представляет собой стабильную оптическую среду для пассажира, но вестибулярные органы передают движение самолета во время поворотов и маневров при посадке.
Когда такое сенсорное несоответствие или конфликт не может быть разрешен быстро и правильно, возникает кризис, известный как «укачивание», который сопровождается рядом симптомов, а именно бледностью, усталостью с зеванием, ощущением желудка, потливостью и т. Д. тошнота и рвота.
Вестибулярная система использует тошноту и рвоту в качестве выхода для экстренной помощи вместо боли, как это имеет место во всех других сенсорных системах. Причина этого неизвестна, но мы знаем, что не было бы никаких ярмарочных машин, если бы вестибулярная система вызывала боль при чрезмерной стимуляции.
Причина этого неизвестна, но мы знаем, что не было бы никаких ярмарочных машин, если бы вестибулярная система вызывала боль при чрезмерной стимуляции.
Строго говоря, чтобы избежать укачивания, нужно предотвратить внезапное сенсорное рассогласование. Не следует делать быстрых движений головой, когда все тело находится в пассивном движении. Сочетание быстрых активных и пассивных движений связано со вспышкой укачивания. Существует также широкая индивидуальная изменчивость предрасположенности к укачиванию в одной и той же провокационной ситуации.
J. W. v. Goethe был гиперчувствителен к укачиванию.Он описал свои проблемы во время своего путешествия по Италии в круизе на корабле из Неаполя в Палермо на острове Сицилия. Он был очень зол не только из-за собственной укачивания, но и из-за того, что его спутник не пострадал и, кроме того, наслаждался едой.
Одна из причин такой вариабельности может заключаться в разнице в массе отокониев между правым и левым лабиринтами, что приводит к асимметричному афферентному входу в центральные вестибулярные ядра.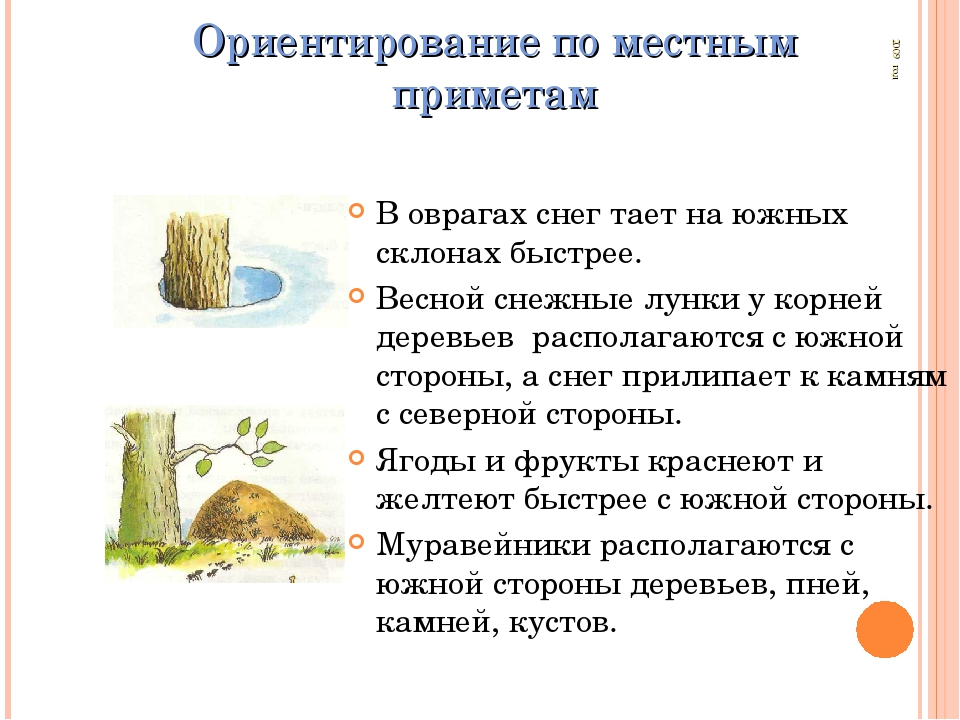
Обычно в нашем репертуаре активных движений эта разница хорошо компенсируется на нейронном уровне.Однако во время пассивного движения эта асимметрия потенциально может привести к сенсорному несоответствию и, следовательно, сыграть роль в возникновении укачивания. Хотя оказалось трудно измерить эффективную массу отокониев у млекопитающих, оказалось возможным измерить массу отдельных отокониальных камней у рыб. В серии измерений, проведенных с форелью, лососем и xiphophoris Helleri справа налево, были обнаружены различия до 76 процентов (Scherer et al. 1997).
В случае сенсорного конфликта (рассогласования) в области центральных вестибулярных ядер в игру вступают иерархические структуры мозга.Как мы знаем, зрительная система доминирует над вестибулярной, а внутри вестибулярной системы эволюционно более старые отолитовые органы доминируют над полукружными каналами.
Этот иерархический принцип можно заметить, сидя в стационарном поезде на вокзале. Когда соседний поезд начинает движение, сразу создается впечатление, что его собственный поезд тронулся, а другой поезд стоит на месте.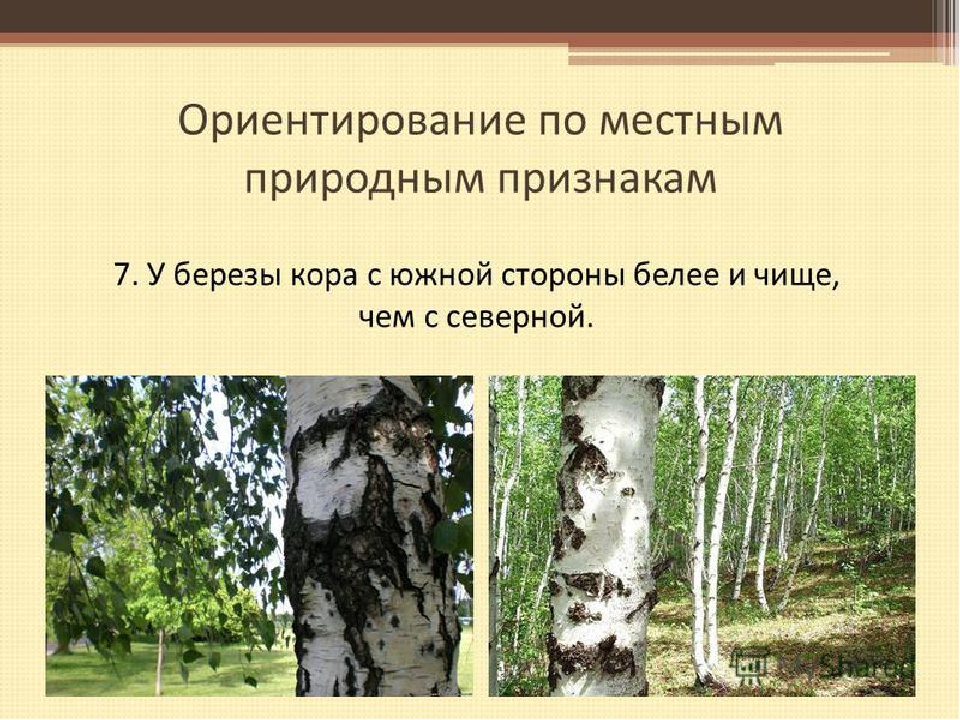 В этом случае различных сенсорных входов (оптических: движущихся; вестибулярных и соматосенсорных: стационарных) доминирующая зрительная система определяет восприятие.
В этом случае различных сенсорных входов (оптических: движущихся; вестибулярных и соматосенсорных: стационарных) доминирующая зрительная система определяет восприятие.
Физиология пространственной ориентации — StatPearls
Введение
Пространственная дезориентация, связанная с авиацией, как описано Бенсоном, происходит, когда «пилот не может правильно определить положение, движение или ориентацию своего самолета или себя в пределах фиксированной координаты. система обеспечивается поверхностью Земли и гравитационной вертикалью ». Другими словами, пространственная ориентация — это естественная способность сохранять ориентацию тела и / или позу по отношению к окружающей среде в состоянии покоя и во время движения.Люди от природы созданы, чтобы сохранять ориентацию на земле в двухмерной среде. Авиация включает в себя трехмерную среду и может привести к сенсорным конфликтам, затрудняя ориентацию или даже делая ее невозможной. Пространственная дезориентация — это явление, хорошо известное авиаторам, но оно остается неясным и остается одной из основных причин авиационных происшествий.
Пространственная дезориентация достигается за счет трех основных сенсорных источников: зрительного, вестибулярного и проприоцептивного.Чтобы достичь правильной ориентации, тело полагается на точное восприятие и когнитивную интеграцию всех трех систем. Если зрительные, вестибулярные и проприоцептивные стимулы различаются по величине, направлению и частоте, в результате возникает пространственная дезориентация.
Человеческий глаз обеспечивает визуальную и пространственную ориентацию, которая обеспечивает около 80% сенсорных входов, необходимых для поддержания ориентации. Вестибулярная система внутреннего уха составляет 15%. На проприоцептивные сенсорные сигналы от рецепторов, расположенных в коже, мышцах, сухожилиях и суставах, приходится 5% сенсорной информации, используемой для определения ориентации.[1] Сложная координация этих сенсорных входов затем транслируется и интерпретируется мозгом. [2] Неправильная интерпретация или неточность этих трех источников информации может привести к «сенсорному несоответствию», что приведет к множеству зрительных или вестибулярных иллюзий.
Проблемы, вызывающие озабоченность
В учебной программе Морского института аэрокосмической медицины (НАМИ) пространственная дезориентация (SD) классифицируется следующим образом:
Тип 1: Неизвестно
В этом типе ввод корректирующего контроля не производится, поскольку неизвестный.Пример: Leans
Тип 2: Распознается
В этом типе пилот распознает путаницу восприятия. Правильные управляющие входы все еще возможны. Пример: Graveyard Spin
Тип 3: Выведение из строя
В этом типе сюжет выведен из строя / ослаблен до такой степени, что он не может восстановить самолет. Даже если он осознает их дезориентацию, он не может исправить это из-за крайних конфликтов сенсорной системы.Пример: Эффект Кориолиса
Факторы, влияющие на частоту пространственной дезориентации пилота.
Физические факторы, такие как погода, время ночи, продолжительность или тип миссии.
Физиологические факторы, такие как болезнь, самолечение, алкоголь или усталость.
Другие факторы включают опыт пилота, подготовку к миссии и т. Д.
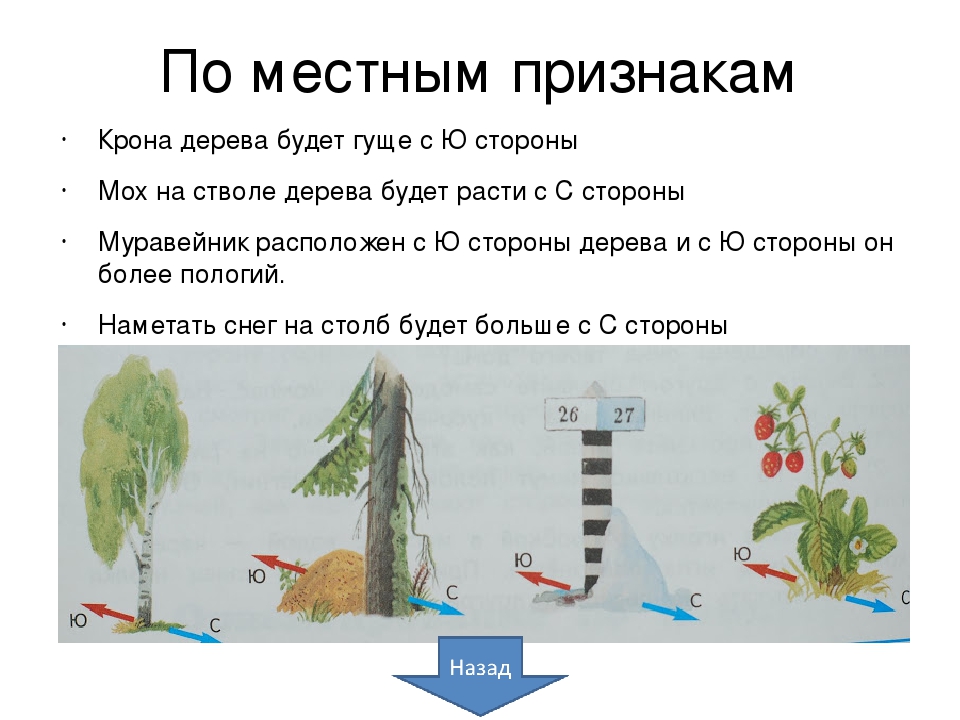
Условия, повышающие вероятность пространственной дезориентации, включают условия полета по приборам, полеты с очками ночного видения, полет без посторонней помощи в ночное время и полет с избыточной перегрузкой.Но пространственная дезориентация может произойти во время любого полета.
Ниже приведены физиология сенсорной системы, соответствующая анатомия и некоторые из наиболее распространенных типов иллюзий, связанных с авиацией:
Визуальные иллюзии
Во время полета визуальные ориентиры являются наибольшим фактором точной пространственной ориентации. Как центральное (фовеальное), так и периферическое (окружающее) зрение действуют синергетически, чтобы установить визуальную ориентацию.
Центральное зрение используется для идентификации объектов.Он сознательно контролируется, требует активного внимания для сосредоточения и его легко отвлечь. Центральное зрение интерпретирует мельчайшие детали, позволяет четко распознавать объекты и содержит большую часть колбочек сетчатки, что улучшает восприятие цвета. Периферийное зрение часто бывает подсознательным, не требует сосредоточенного внимания и не отвлекает. Периферийное зрение используется для сбора общей информации об окружающей среде и определения движения.
Периферийное зрение часто бывает подсознательным, не требует сосредоточенного внимания и не отвлекает. Периферийное зрение используется для сбора общей информации об окружающей среде и определения движения.
Используя визуальные ориентиры, пилот может собирать информацию о расстоянии, скорости и глубине.Несколько инструментов используются для создания визуального ориентира, включая бинокулярное зрение, монокулярное зрение, параллакс движения и размер изображения сетчатки. Бинокулярное зрение использует различия между изображениями сетчатки для определения местоположения и движения объекта и эффективно для объектов или местности на расстоянии до 200 м. Монокулярное зрение позволяет расширить поле зрения за счет ограниченного восприятия глубины. Параллакс движения основан на монокулярном зрении и связан с относительной скоростью объектов, движущихся по сетчатке.Считается, что более быстро движущиеся объекты находятся ближе, чем более медленно движущиеся объекты в поле зрения. Размер изображения на сетчатке заставляет более крупные объекты казаться ближе, а изображения меньшего размера — более отдаленными. Кроме того, визуальная справка может быть установлена по различиям в текстуре, деталях, тенях, освещении, четкости объекта и размере объектов по сравнению с известными характеристиками или объектами. Кроме того, пилот может поддерживать привязку к горизонту в основном на основе визуальной привязки.Без визуального горизонта или наземных ориентиров летчики должны использовать свои летные приборы и доверять им, а не визуальным и сенсорным входам [3].
Кроме того, визуальная справка может быть установлена по различиям в текстуре, деталях, тенях, освещении, четкости объекта и размере объектов по сравнению с известными характеристиками или объектами. Кроме того, пилот может поддерживать привязку к горизонту в основном на основе визуальной привязки.Без визуального горизонта или наземных ориентиров летчики должны использовать свои летные приборы и доверять им, а не визуальным и сенсорным входам [3].
Визуальные иллюзии можно встретить как в повседневной жизни, так и в авиационной среде. Эти визуальные иллюзии часто являются результатом потери или обмана основных или окружающих визуальных сигналов.
Общие визуальные иллюзии
Иллюзия воздушной перспективы : у пилота естественным образом создается мысленный каталог того, как выглядит обычная взлетно-посадочная полоса.Он / она строит образ ожидаемой длины, ширины и уклона средней взлетно-посадочной полосы на основе своего опыта. Эта базовая линия позволяет им корректировать глиссаду на конечном заходе на посадку.
Иллюзии постоянства формы и размера ВПП
Широкая взлетно-посадочная полоса может создать иллюзию того, что он находится ближе к земле, чем ожидалось, из-за чего пилот ошибочно полагает, что он / она должен исправить это, увеличив высоту. Это приводит к высокому заходу на посадку (повышенному риску сваливания или ухода на второй круг) к ВПП.
Узкая взлетно-посадочная полоса может создать иллюзию того, что он находится дальше от земли, из-за чего пилот ошибочно почувствует, что он / она должен исправить это, уменьшив высоту. Это приводит к низкому приближению к взлетно-посадочной полосе (повышенный риск приземления за пределами взлетно-посадочной полосы или сваливание на факеле).
Посадка на взлетно-посадочную полосу с восходящим уклоном может создать иллюзию захода на посадку с большой высоты. Пилот может быть склонен к исправлению, уменьшая высоту. Это приводит к низкому подходу к взлетно-посадочной полосе (повышенный риск приземления за пределами взлетно-посадочной полосы или сваливание на факеле).
Приземление на взлетно-посадочную полосу с уклоном может создать иллюзию захода на посадку на малой высоте. Пилот может быть склонен к корректировке, увеличивая высоту, что приведет к высокому приближению (повышенный риск сваливания или ухода на второй круг) к ВПП.
Размер местности и иллюзии постоянства
Посадка на взлетно-посадочную полосу с крутым уклоном, ведущим к конечному этапу захода на посадку, может создать иллюзию того, что вы находитесь на большей высоте, чем ожидалось. Пилот может быть склонен к корректировке, уменьшая высоту, что приводит к заходу на посадку на малой высоте (повышенный риск приземления не далеко от взлетно-посадочной полосы или сваливание на факеле).
Посадка на взлетно-посадочную полосу с нисходящим уклоном, ведущим к конечному этапу захода на посадку, может создать иллюзию того, что вы находитесь на более низкой высоте, чем ожидалось. Пилот может быть склонен к исправлению, увеличивая высоту, что приводит к заходу на посадку на большой высоте (повышенный риск сваливания или ухода на второй круг).
Ambien Illusions
Vection Illusion : Иллюзия, при которой кто-то чувствует, что его или ее тело движется, когда нет движения. Мозг воспринимает периферическое движение без достаточных других сигналов этого движения.Если вы сидите в машине на светофоре и машина рядом с вами медленно движется вперед, может возникнуть ощущение, что ваша машина движется назад.
False Horizons Иллюзия : Иллюзия, которая возникает, когда пилот ориентирует самолет на ложный горизонт. Это может происходить во время ночного полета, полета над безликой местностью, полета через облака и полета вблизи наземных огней, которые трудно отличить от ночного неба.
Белый / Коричневый : Когда самолет приближается к земле в снежных (белых) или пыльных (коричневых) условиях, поток ротора вниз может взорвать почвенный покров.Это может привести к потере визуального контроля пилотом и экипажем при приближении к земле. Эта потеря визуальной ориентировки может вызвать пространственную дезориентацию и потерю ситуационной осведомленности.
Иллюзия черной дыры : Эта визуальная иллюзия может возникать во время ночных посадок или в темноте, когда горизонт не виден и местность не освещена. Это создает ощущение «черной дыры» между самолетом и взлетно-посадочной полосой, что может привести к завышению глиссады и ошибочному началу агрессивного снижения.[4]
Иллюзия эффекта водопада : Когда винтокрылый самолет парит над водным пространством, винты поднимают воду, и она падает на лобовое стекло. Это может вызвать визуальную иллюзию того, что самолет поднимается.
Вестибулярные иллюзии : Вестибулярные сенсорные системы составляют 15% входных сигналов, используемых для поддержания пространственной ориентации и обеспечения чувства равновесия. Вестибулярный аппарат является частью перепончатого лабиринта внутреннего уха и заложен глубоко в височной кости.Вестибулярный аппарат связан со слуховой частью лабиринта и состоит из полукружных каналов и отолитовых органов.
Полукружные каналы
Три полукружных канала — горизонтальный, передний и задний — ориентированы перпендикулярно (под углом 90 градусов) друг к другу. Позиционирование канала позволяет определять угловое ускорение во всех трех плоскостях движения: коронарной, сагиттальной и поперечной осях. Ускорение обнаруживается в трех каналах, когда жидкая эндолимфа в каналах перемещается, вызывая движение ресничек, прикрепленных к волосковым клеткам, расположенным внутри купулы полукружного канала.Это отклонение ресничек вызывает активацию волосковых клеток. [5]
Позиционирование канала позволяет определять угловое ускорение во всех трех плоскостях движения: коронарной, сагиттальной и поперечной осях. Ускорение обнаруживается в трех каналах, когда жидкая эндолимфа в каналах перемещается, вызывая движение ресничек, прикрепленных к волосковым клеткам, расположенным внутри купулы полукружного канала.Это отклонение ресничек вызывает активацию волосковых клеток. [5]
При прямом и горизонтальном полете эндолимфа не движется, и, следовательно, нет движения ресничек сенсорных волосковых клеток. Это интерпретируется телом как среда без углового ускорения, т. Е. Нет поворота. Волосковые клетки действуют как акселерометры и при постоянной скорости остаются деактивированными.
Во время полета, когда голова пилота или самолет движется, полукружный канал, а следовательно, и сенсорная волосковая клетка движутся.Однако инерция будет действовать на эндолимфу, чтобы на короткое время оставаться в неподвижном состоянии. Неподвижная жидкость притягивает движущиеся реснички волосковых клеток и приводит к точному восприятию поворота. Если этот поворот сохраняется в течение 10-20 секунд, эндолимфа догонит полукружный канал, и волосковые клетки вернутся в нейтральную вертикальную ориентацию. Когда это происходит, самолет все еще может находиться в развороте, но мозг пилота может ошибочно интерпретировать, что разворот остановился, поскольку в вестибулярной системе не обнаружено углового ускорения.Когда пилот вернется к прямому горизонтальному полету, произойдет то же самое. Полукружные каналы и волосковые клетки будут двигаться вместе с выкаткой, но инерция будет действовать на эндолимфу, чтобы на мгновение удерживать ее в неподвижном состоянии. Это будет ошибочно сигнализировать мозгу о том, что пилот теперь поворачивает в противоположном направлении, в то время как в действительности пилот выкатывается из первоначального поворота.
Если этот поворот сохраняется в течение 10-20 секунд, эндолимфа догонит полукружный канал, и волосковые клетки вернутся в нейтральную вертикальную ориентацию. Когда это происходит, самолет все еще может находиться в развороте, но мозг пилота может ошибочно интерпретировать, что разворот остановился, поскольку в вестибулярной системе не обнаружено углового ускорения.Когда пилот вернется к прямому горизонтальному полету, произойдет то же самое. Полукружные каналы и волосковые клетки будут двигаться вместе с выкаткой, но инерция будет действовать на эндолимфу, чтобы на мгновение удерживать ее в неподвижном состоянии. Это будет ошибочно сигнализировать мозгу о том, что пилот теперь поворачивает в противоположном направлении, в то время как в действительности пилот выкатывается из первоначального поворота.
Волосковые клетки вестибулярной системы могут обнаруживать изменение ускорения, однако они не могут отличить покой от постоянной скорости.Описанное выше недопонимание в сенсорной системе углового ускорения является основой полукруглых вестибулярных иллюзий.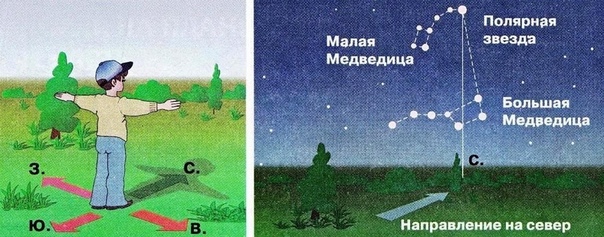 Эти иллюзии обычно запускаются, когда мозг интерпретирует ложное ощущение вращения в отсутствие надежных внешних визуальных сигналов. [1]
Эти иллюзии обычно запускаются, когда мозг интерпретирует ложное ощущение вращения в отсутствие надежных внешних визуальных сигналов. [1]
Соматогиральные вестибулярные иллюзии: Ложное ощущение поворота (или отсутствия поворота) из-за врожденных проблем, связанных с функцией полукружного канала.
Иллюзия наклона: Вызвано резким возвратом к горизонтальному полету после продолжительного незаметного поворота.Когда пилот переходит в горизонтальный полет, он будет чувствовать, что поворачивает в противоположном направлении.
The Graveyard Spin Illusion: Вызывается, когда пилот намеренно или непреднамеренно выполняет вращение. Первоначально полукружные каналы будут регистрировать угловое движение, но при продолжительном вращении это ощущение будет постепенно уменьшаться. Когда пилот применяет соответствующий руль направления, чтобы остановить вращение, ему может казаться, что они вращаются в противоположном направлении. Это вызывает конфликт между тем, что чувствует пилот, и тем, что видно на полетных приборах.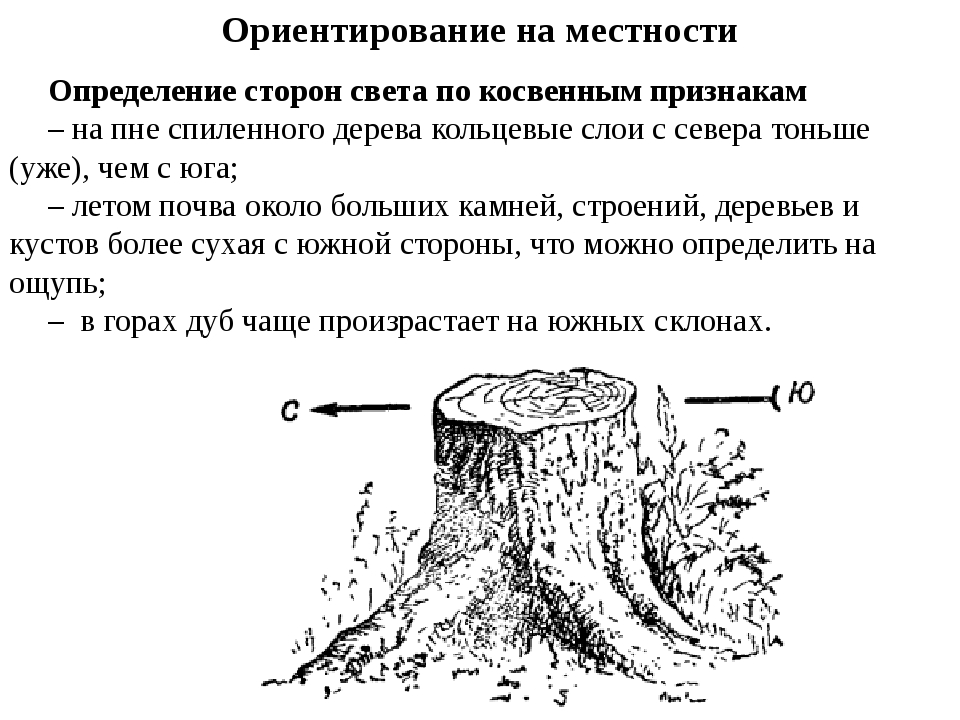 Если пилот поверит своему телу, он продолжит первоначальное вращение и потеряет высоту.
Если пилот поверит своему телу, он продолжит первоначальное вращение и потеряет высоту.
The Graveyard Spiral Illusion: Вызывается, когда пилот входит в длительный поворот. Когда пилот возвращается в горизонтальный полет, ему может казаться, что он поворачивает в противоположном направлении. Если пилот поверит ощущениям от своего тела, он снова войдет в исходный поворот. Если иллюзия остается нераспознанной пилотом, пилот продолжит первоначальный поворот и потеряет высоту.
Иллюзия Кориолиса: Происходит, когда пилот наклоняет голову вперед / назад во время поворота. Это вызовет одновременную стимуляцию двух полукружных каналов и приведет к ощущению одновременно крена, тангажа и рыскания самолета, что может сильно дезориентировать во время полета.
Отолитовые органы
Отолитовые органы состоят из мешочка и матрикса и расположены под прямым углом друг к другу. Сумка определяет линейное ускорение в горизонтальной плоскости.Мешочек обнаруживает изменения силы тяжести в вертикальной плоскости. Они расположены внутри внутреннего уха, рядом с преддвериями полукружных каналов. Органы отолита покрыты волосками, которые поднимаются вверх в студенистый материал, называемый купулой. Есть небольшие частицы кальция, называемые отокониями, которые покрывают купулу. При движении отоконий будет тянуть купулу по отношению к волосам. Это передаст ощущение линейного ускорения и силы тяжести. Иллюзии, связанные с отолитовыми органами, обычно возникают в условиях деградированных внешних визуальных сигналов и ориентиров.
Они расположены внутри внутреннего уха, рядом с преддвериями полукружных каналов. Органы отолита покрыты волосками, которые поднимаются вверх в студенистый материал, называемый купулой. Есть небольшие частицы кальция, называемые отокониями, которые покрывают купулу. При движении отоконий будет тянуть купулу по отношению к волосам. Это передаст ощущение линейного ускорения и силы тяжести. Иллюзии, связанные с отолитовыми органами, обычно возникают в условиях деградированных внешних визуальных сигналов и ориентиров.
Соматогравические вестибулярные иллюзии: Ощущение ложного изменения высоты звука в результате линейного ускорения
Иллюзия инверсии : вызвано крутым подъемом во время полета, вызывающим ощущение ускорения вперед, за которым следует внезапное возвращение к горизонтальному полету. Это может создать иллюзию того, что пилот находится в перевернутом полете.
The Heads-Up Illusion : Вызывается внезапным поступательным линейным ускорением, которое воспринимается как полет с поднятым носом, которое заставляет пилота корректировать самолет, наклоняя нос вниз. Это значительный риск для высокопроизводительных самолетов при взлете; например, при взлете катапульты с авианосца.
Это значительный риск для высокопроизводительных самолетов при взлете; например, при взлете катапульты с авианосца.
Иллюзия опущения головы: Вызвано внезапным линейным замедлением с воспринимаемой иллюзией положения носа вниз. Естественной реакцией пилота будет поднять нос самолета вверх. Это может привести к сваливанию на конечном этапе захода на посадку.
Проприоцептивные рецепторы
Проприоцептивные сенсорные входы дают нам представление о позе и относительном положении нашего тела по отношению к окружающей среде.Они играют небольшую роль в поддержании чувства пространственной ориентации. Сенсорное несоответствие между окружающей средой и проприоцептивными рецепторами само по себе не приведет к пространственной дезориентации. Однако они могут усилить дезориентацию, если задействованы и другие зрительные и вестибулярные системы.
Соматосенсорная иллюзия: Может возникнуть, когда пилот испытывает перегрузку. Проприоцептивные рецепторы пилота получают противоречивые данные от гравитационных сил и гравитационных сил. Это широко известно как иллюзия «сиденья в штанах».Проприоцептивная система ненадежна и может легко подавляться другими сенсорными системами.
Это широко известно как иллюзия «сиденья в штанах».Проприоцептивная система ненадежна и может легко подавляться другими сенсорными системами.
Клиническое значение
Военная авиация возникла в начале 1900-х годов, и возможности и ограничения платформы продолжают проверяться и расширяться. В 1950-х годах военно-морская авиация США начала отслеживать количество неудач. Данные, опубликованные ВМС США, показывают, что в первой половине 1950-х годов количество аварий класса А военно-морской авиации превышало 50 аварий на 100000 летных часов.Благодаря внедрению нескольких функций безопасности, протоколов и усовершенствованных технологий, с 1990-х годов частота сбоев составляет менее пяти аварий на 100 000 летных часов.
Однако пространственная дезориентация по-прежнему является наиболее частой причиной авиационных происшествий с участием человека. Анализ причин неудач авиации ВМФ является одной из основных причин неудач класса А. При рассмотрении данных Центра безопасности НАМИ, в авариях класса А, включая пространственную дезориентацию как причинный фактор, с 2000 по 2017 год коэффициент летальности экипажа составил 38% (на других ресурсах уровень смертности намного выше). В некоторых отчетах упоминается, что пространственная дезориентация является причиной от 25% до 33% всех аварий с самолетами. [6] Также очевидно, что количество несчастных случаев, связанных с дезориентацией, не снизилось пропорционально другим причинам несчастных случаев. Пространственная дезориентация продолжает оставаться основной причиной авиационных происшествий и несчастных случаев со смертельным исходом и затрагивает все виды авиации, включая военную, коммерческую и авиацию общего назначения.
В некоторых отчетах упоминается, что пространственная дезориентация является причиной от 25% до 33% всех аварий с самолетами. [6] Также очевидно, что количество несчастных случаев, связанных с дезориентацией, не снизилось пропорционально другим причинам несчастных случаев. Пространственная дезориентация продолжает оставаться основной причиной авиационных происшествий и несчастных случаев со смертельным исходом и затрагивает все виды авиации, включая военную, коммерческую и авиацию общего назначения.
Пространственная дезориентация — это явление, описываемое с тех пор, как началась авиация; однако сложные механизмы этого процесса так и остались невыясненными.Потеря пространственной ориентации почти всегда является результатом сбоя в основном контуре управления оператором. Это отвлечение, которое вызывает нарушение способности сознательного центра точно обрабатывать сенсорную входную информацию. Это может быть вторичным по отношению к сбою в сканировании кабины, насыщению задач, которое превышает предел задач мозга, которые могут быть обработаны, или другому внешнему источнику. Это нарушение вызвано визуальным, вестибулярным, проприоцептивным или когнитивным несоответствием, которое может привести к различию в восприятии фактической и предполагаемой ориентации самолета.Однако простое несоответствие не обязательно означает наличие иллюзии. Если экипаж знает о сенсорном несоответствии, он может сознательно или бессознательно игнорировать этот сенсорный ввод и вместо этого полагаться на свои летные приборы. Несчастные случаи и несчастные случаи происходят, когда экипаж не может преодолеть внутренние сенсорные воздействия или когда они не осознают, что существуют какие-либо проблемы с восприятием.
Это нарушение вызвано визуальным, вестибулярным, проприоцептивным или когнитивным несоответствием, которое может привести к различию в восприятии фактической и предполагаемой ориентации самолета.Однако простое несоответствие не обязательно означает наличие иллюзии. Если экипаж знает о сенсорном несоответствии, он может сознательно или бессознательно игнорировать этот сенсорный ввод и вместо этого полагаться на свои летные приборы. Несчастные случаи и несчастные случаи происходят, когда экипаж не может преодолеть внутренние сенсорные воздействия или когда они не осознают, что существуют какие-либо проблемы с восприятием.
Смягчение пространственной дезориентации
Личный опыт пространственной дезориентации — один из лучших способов быстро распознать, когда это происходит во время полета.Такие инструменты, как стул Барани или Демонстратор пространственной дезориентации виртуальной реальности, моделируют сенсорные иллюзии и дают пилоту непосредственный опыт до того, как они возникнут.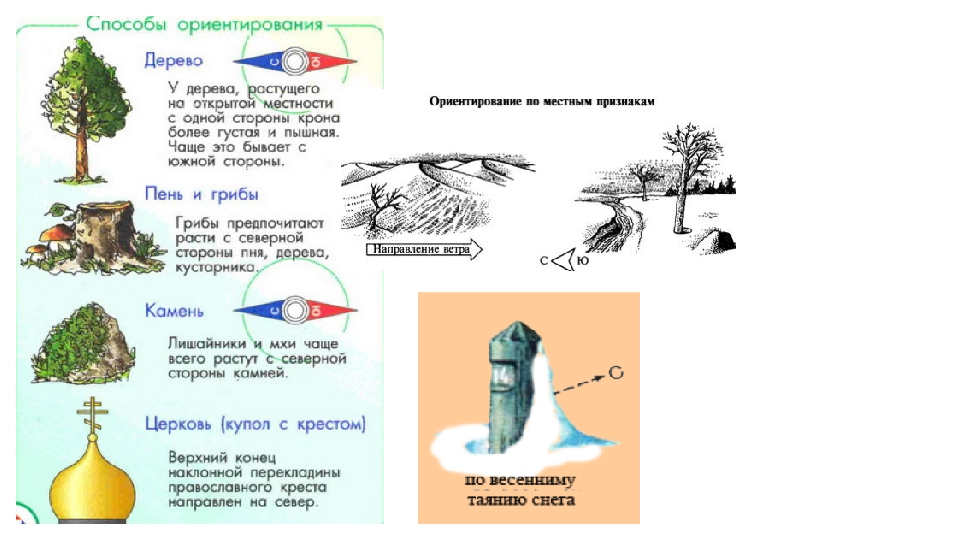 Прежде чем экипаж отправится в полет, он должен ознакомиться с местностью, особенностями и знать размер и форму основных объектов, над которыми они будут летать. Инструменты, которые можно использовать в кабине экипажа во время полета, включают обеспечение эффективного сканирования приборов. Постоянная перекрестная проверка приборов поможет определить истинную ориентацию самолета, даже если пилот испытывает иллюзию.Кроме того, поддержание координации и связи между экипажем и вышкой улучшит ситуационную осведомленность и распределит нагрузку на задачи, чтобы снизить вероятность пространственной дезориентации. Наконец, пилот, который начинает ощущать эффекты пространственной ориентации, должен доверять приборам, а не противоречивым сигналам, исходящим от их тела. Если в самолете находятся два пилота, передайте управление им пилоту, который не испытывает сенсорных иллюзий. [1]
Прежде чем экипаж отправится в полет, он должен ознакомиться с местностью, особенностями и знать размер и форму основных объектов, над которыми они будут летать. Инструменты, которые можно использовать в кабине экипажа во время полета, включают обеспечение эффективного сканирования приборов. Постоянная перекрестная проверка приборов поможет определить истинную ориентацию самолета, даже если пилот испытывает иллюзию.Кроме того, поддержание координации и связи между экипажем и вышкой улучшит ситуационную осведомленность и распределит нагрузку на задачи, чтобы снизить вероятность пространственной дезориентации. Наконец, пилот, который начинает ощущать эффекты пространственной ориентации, должен доверять приборам, а не противоречивым сигналам, исходящим от их тела. Если в самолете находятся два пилота, передайте управление им пилоту, который не испытывает сенсорных иллюзий. [1]
Необходимы дополнительные исследования, обучение и технологии, чтобы лучше определять и понимать связанную с авиацией пространственную дезориентацию, измерять явления пространственной дезориентации и готовить экипажи для успешного смягчения ее последствий.
Восприятие фигурного фона в бодрствующей мыши и нейронная активность, вызванная стимулами фигурного фона в первичной зрительной коре
Поведенческая задача
В общей сложности восемь мышей были обучены, чтобы проверить, могут ли они воспринимать изображения фигурного фона с заданной ориентацией. Семь мышей выучили задание, но одно животное не смогло усвоить стимулы стадии 1 (определение фигуры на основе яркости, рис. 1B) и все еще выполняло случайно после 49 сеансов. Поэтому данные этого животного не были приняты во внимание, и все анализы основаны на результатах, полученных от 7 других животных.Этим животным потребовалось 9,1 (SEM = 1,5) сеансов, чтобы справиться с задачей распознавания на этапе 1 только на основе яркости (рисунок S1). Введение круглой решетки на этапе 2 не повлияло на производительность (рис. 1D, слева). Средняя производительность для стимулов с заданной яркостью, которые уже были введены на более раннем этапе, составила 83% (SEM = 1,9%), а точность для новых решеточных стимулов составила 86% (SEM = 2%). Эта разница в точности не была значимой (парный t-критерий с 6 степенями свободы, t (6) = -0.942, р = 0,382).
Эта разница в точности не была значимой (парный t-критерий с 6 степенями свободы, t (6) = -0.942, р = 0,382).
На этапе 3 мы ввели стимулы «фигура-фон». В начале этого этапа животные не сразу переходили к решетчатым кружкам с одной ориентацией на фонах с решетками с ортогональной ориентацией (рис. 1D, справа). На ранних сессиях средняя точность для уже знакомых стимулов стадии 2 составляла 81% (SEM = 1%), но она составляла только 61% (SEM = 5%) для новых стимулов, определенных решеткой (t (6) = 3,7, р = 0,01). Два животных достигли критериев производительности (80% или выше) после 8 сеансов.Оставшихся животных перевели на сеансы, в которых мы предъявляли только стимулы стадии 3 (см. Методы и рисунок S1). Теперь они достигли выполнения критериев в среднем после 3,4 сеансов (SD = 1,3). Крайняя левая полоса на рис. 1E показывает окончательную точность для стимулов стадии 3, усредненную по последним двум сеансам для 7 животных.
Затем мы провели три теста, чтобы увидеть, как обучение переносится на вариации стимулов «фигура-фон». Сначала мы проверили влияние размера фигуры, измерив точность фигур 12 °, 18 ° и 24 ° (рис.1E, второй график), которые были меньше исходных значений 30 °. Точность была ниже для меньших фигур (однофакторный ANOVA с повторными измерениями, F (2,12) = 5,3, p = 0,022). Парный t-тест показал, что точность с фигурами 12 ° была ниже, чем точность с фигурами 24 ° (t (6) = 2,7, p = 0,035), но для каждого размера точность оставалась выше случайного уровня (все ps <0,01). Таким образом, мыши смогли обобщить свою производительность на основе значительного разброса размеров фигур.
Сначала мы проверили влияние размера фигуры, измерив точность фигур 12 °, 18 ° и 24 ° (рис.1E, второй график), которые были меньше исходных значений 30 °. Точность была ниже для меньших фигур (однофакторный ANOVA с повторными измерениями, F (2,12) = 5,3, p = 0,022). Парный t-тест показал, что точность с фигурами 12 ° была ниже, чем точность с фигурами 24 ° (t (6) = 2,7, p = 0,035), но для каждого размера точность оставалась выше случайного уровня (все ps <0,01). Таким образом, мыши смогли обобщить свою производительность на основе значительного разброса размеров фигур.
Изменение положения фигурки также повлияло на производительность (F (3,18) = 12.1, p <0,001) (рис. 1E, третий график). В частности, производительность для верхней позиции была ниже, чем для других позиций (все ps <0,025), но точность была выше вероятности для всех позиций (все ps <0,01). Таким образом, животные не демонстрировали идеального обобщения, когда круговая фигура не находилась в исходном положении, но, тем не менее, они обобщались для всех позиций, которые мы тестировали. Наконец, точность стимула, в котором фаза фигурной решетки сдвинута на 180 ° (рис.1E, справа) был выше уровня случайности (t (6) = 16,9, p <0,001) и существенно не отличался от такового для стимулов с исходной фазой (t (6) = 1,24, p = 0,26).
Наконец, точность стимула, в котором фаза фигурной решетки сдвинута на 180 ° (рис.1E, справа) был выше уровня случайности (t (6) = 16,9, p <0,001) и существенно не отличался от такового для стимулов с исходной фазой (t (6) = 1,24, p = 0,26).
Активность V1, вызванная стимулами «фигура-фон» у бодрствующих мышей
Затем мы исследовали обработку стимулов «фигура-фон» в области V1 у 4 бодрствующих мышей и регистрировали нейронную активность с помощью ламинарных зондов с расстоянием 100 мкм между точками контакта для всего 29 проникновений (рис. 2В). Сначала мы нанесли на карту рецептивные поля MUA на разных глубинах.Красные эллипсы на фиг. 2С иллюстрируют перекрывающиеся RF одного примера проникновения в соответствии с расположением электрода перпендикулярно кортикальной поверхности. Затем мы определили CSD (рис. 2D), чтобы оценить размещение электрода в корковых слоях. CSD имел характерный сток в слоях III-IV (красный на рис. 2D) 12,26,27,28,29 , и мы подтвердили, что электрод покрывает все слои первичной зрительной коры.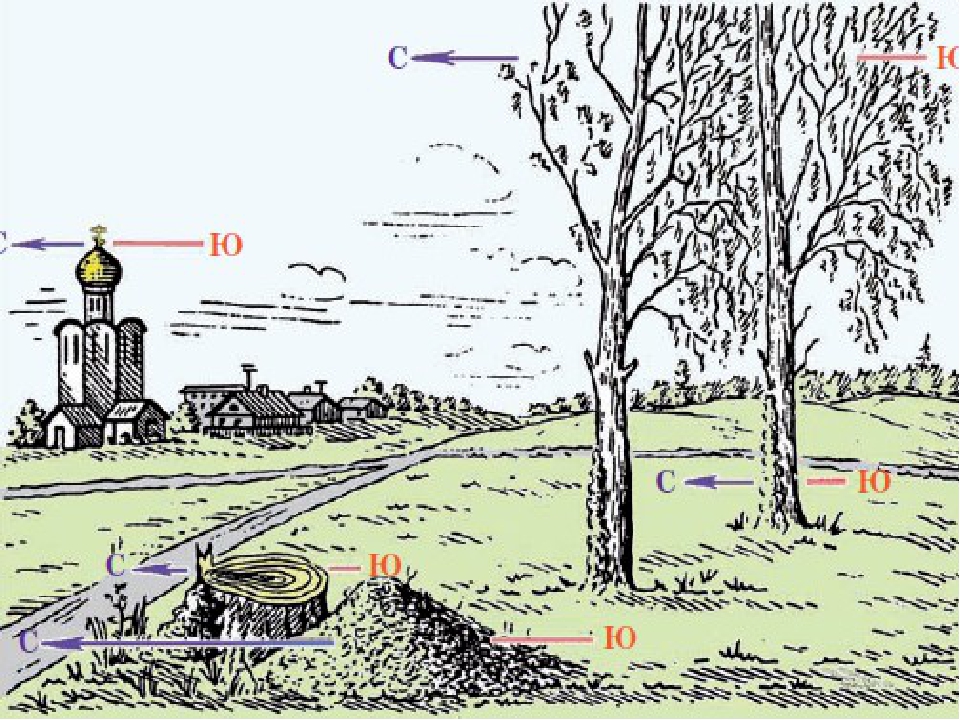
Затем мы предъявили стимулы «фигура-фон».Фигура представляла собой круглую область под углом 50 ° с ориентацией, ортогональной ориентации фона (фиг. 2A; черный кружок на фиг. 2C). Мы представили фигуру с горизонтальной ориентацией на вертикально ориентированном фоне в некоторых испытаниях и использовали противоположную комбинацию ориентаций в других испытаниях. Таким образом, мы обеспечили, чтобы решетка в RF была точно такой же как на рисунке, так и на фоне, и что отличался только контекст. Таким образом, различия в активности, вызванные фигурой и фоновыми условиями, должны быть отнесены к различиям в контексте, определяемом стимулом за пределами классической RF.При испытаниях фигур RF со средним размером 30 ° полностью попадали в область фигуры 50 °. Мы также включили условие «края», в котором мы поместили край между фигурой и фоном в воспринимающем поле. Последним стимулом было состояние «дырки», при котором решетчатый стимул появлялся только вне RF, в то время как внутри RF при предъявлении стимула ничего не менялось (рис.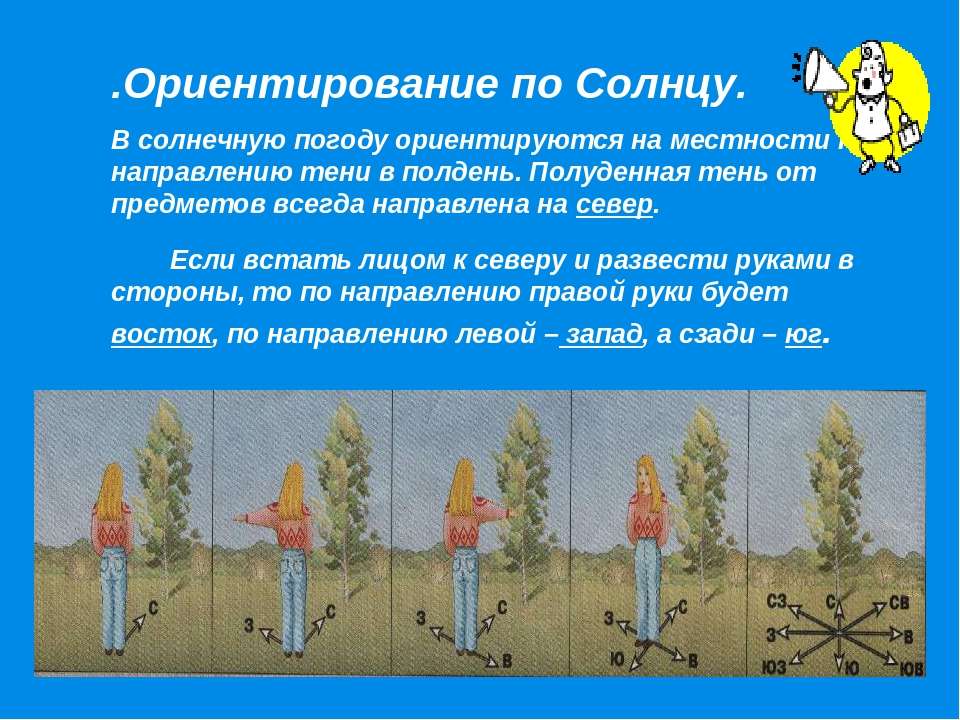 2E, справа).
2E, справа).
На рисунке 2E показан отклик MUA V1 на одном из участков записи в примере проникновения на глубине 135 мкм в слое 2/3.Амплитуда начального отклика была сходной для рисунка, фона и краевых условий (временное окно 0–80 мс после появления стимула, все Ps> 0,05). Однако после задержки реакция на край стала сильнее, чем на фигуру, которая, в свою очередь, стала сильнее, чем реакция на фон (временное окно, 80–300 мс, ANOVA F (3,195) = 22,1, p < 0,001). Апостериорные тесты показали, что активность, вызванная центром фигуры, была сильнее, чем активность, вызванная фоном, и что активность, вызванная краем, была сильнее, чем активность, вызванная центром фигуры (p <0.05). Удивительно, но в состоянии «дыры» ничего не появлялось в RF, но нейроны демонстрировали замедленное увеличение своей активности (зеленый цвет на рис. 2E). Время активности, вызванной стимулом отверстия, соответствовало времени усиления реакции, вызванной фигурой или краем, относительно активности, вызванной фоном.
Результаты, которые мы получили для этого примера места записи, были репрезентативными для эффектов для всех проникновений. Средний размер RF сайтов записи MUA составил 29.5 градусов (полная ширина на половине высоты двумерных гауссиан, которые соответствовали профилям RF, см. Методы). В популяции RFs были хорошо центрированы на фигуре, со средним расстоянием между RF-центром и центром фигуры 5,2 градуса и наибольшим расстоянием 25 градусов (Рис. 3D). Для всех 29 проникновений мы предъявили стимулы, при которых РЧ попал в центр фигуры или на землю, в 21 проникновении мы также поместили край в РЧ, а в 22 проникновения мы предъявили стимул «дырка» без прямого Радиочастотная стимуляция (рис.2E).
Сначала мы исследовали общую активность, объединив активность по испытаниям, глубину кортикального слоя на одно проникновение, а затем по всем проникновениям (рис. 3А). Чтобы определить значимость различий в активности между стимулами, мы рассматривали среднюю активность по испытаниям и каналам проникновения как независимые образцы. Край вызывал более сильный отклик, чем фон в позднем устойчивом временном окне (80–300 мс) (N = 21 проникновение, парный t-тест для всех проникновений, для которых мы включили краевой стимул, t (20) = 13 .7, p <0,001), но не во время раннего окна (N = 21 проникновение, t (20) = 2,01, p = 0,058) (рис. 3B). Точно так же стимул в виде фигурки вызывал большую активность, чем фон во время поздней фазы ответа (рис. 3B, справа), но не было никакой разницы в активности во время фазы раннего ответа (0–80 мс) (рис. 3B, слева) (N = 29 проникновений, парные t-тесты для всех проникновений, раннее окно, t (28) = 1,5 p = 0,144; позднее окно, t (28) = 5,55, p <0,001). Затем мы определили, насколько хорошо нейроны на отдельных участках записи MUA распознают различные стимулы на одном уровне испытаний, вычисляя d’-значения.Во время поздней, устойчивой фазы отклика средний d ’для различения края и фона составлял 0,79 (фиг. 3E) и 0,31 для различения между центром фигуры и фоном (фиг. 3E). Обратите внимание, что ориентация решеток была сбалансирована во время испытаний с фигурой или фоном в RF, так что модуляция ответов происходит из-за организации фигуры и фона и не отражает предпочтение ориентации записанных нейронов.
Край вызывал более сильный отклик, чем фон в позднем устойчивом временном окне (80–300 мс) (N = 21 проникновение, парный t-тест для всех проникновений, для которых мы включили краевой стимул, t (20) = 13 .7, p <0,001), но не во время раннего окна (N = 21 проникновение, t (20) = 2,01, p = 0,058) (рис. 3B). Точно так же стимул в виде фигурки вызывал большую активность, чем фон во время поздней фазы ответа (рис. 3B, справа), но не было никакой разницы в активности во время фазы раннего ответа (0–80 мс) (рис. 3B, слева) (N = 29 проникновений, парные t-тесты для всех проникновений, раннее окно, t (28) = 1,5 p = 0,144; позднее окно, t (28) = 5,55, p <0,001). Затем мы определили, насколько хорошо нейроны на отдельных участках записи MUA распознают различные стимулы на одном уровне испытаний, вычисляя d’-значения.Во время поздней, устойчивой фазы отклика средний d ’для различения края и фона составлял 0,79 (фиг. 3E) и 0,31 для различения между центром фигуры и фоном (фиг. 3E). Обратите внимание, что ориентация решеток была сбалансирована во время испытаний с фигурой или фоном в RF, так что модуляция ответов происходит из-за организации фигуры и фона и не отражает предпочтение ориентации записанных нейронов.
Неожиданный эффект проиллюстрирован на примере проникновения на рис.2E, где состояние «дыры», при котором ничего не появлялось в RF нейронов, тем не менее, вызывало отложенный ответ. Сравнимые отсроченные ответы, вызванные извне классического рецептивного поля, ранее наблюдались в области V1 обезьян 32 . Мы также исследовали этот эффект для всей совокупности проникновений и действительно наблюдали значительную отложенную реакцию (N = 22 проникновения, парный t-тест для всех проникновений, включая стимул отверстия, t (21) = 4,5, p <0,001; зеленый цвет на рис.3A) с синхронизацией, которая была сопоставима с синхронизацией модуляции фигура-фон, т.е. разница в активности, вызванная фигурой и фоном (фиолетовый на фиг. 3A). Подобно модуляции "фигура-фон", ответ на стимул дырки представляет собой контекстное влияние на активность V1 извне РЧ нейронов, потому что мы гарантируем, что решетка стимула "дырка" не активирует РЧ напрямую (рис. 3D). . Это может быть связано с восприятием фигуры в месте расположения отверстия, но мы не включили стимул отверстия в наши поведенческие эксперименты, поэтому этот вывод остается умозрительным.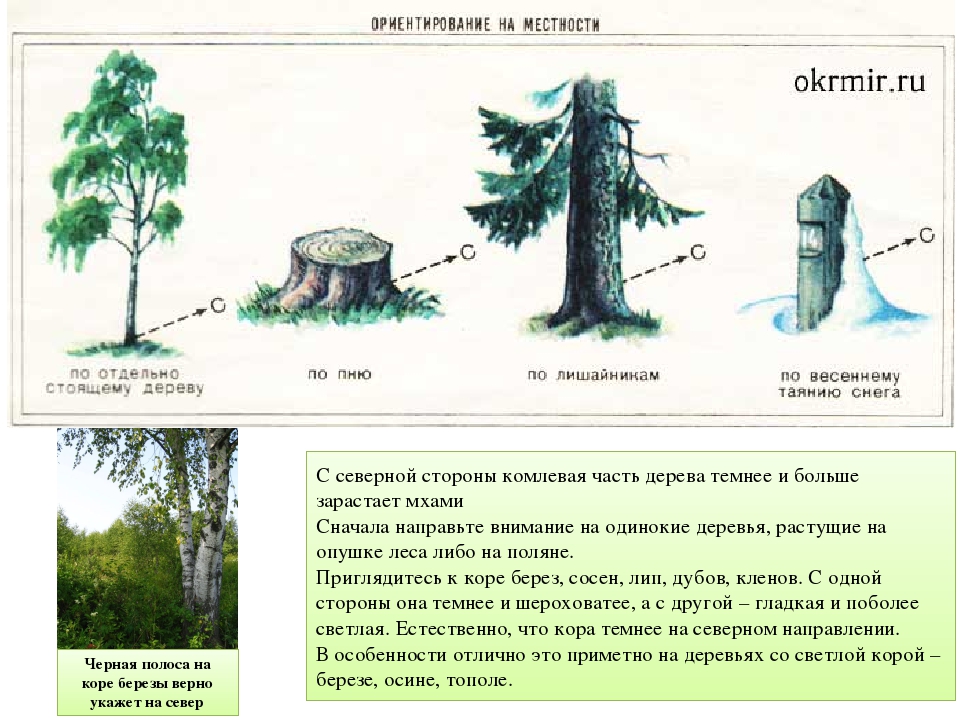
Анализ латентности
Мы использовали метод аппроксимации кривой для измерения латентности визуального ответа и модуляции фигуры-фона (описанной в разделе «Методы») (рис. 3C; 20 проникновений с соответствующими условиями стимула). Средняя задержка визуального отклика составила 52 мс, что было значительно раньше, чем дополнительная активность, вызванная краем, со средней задержкой 70 мс (p <0,01; тест начальной загрузки, см. Методы) и модуляцией фигура-основа с задержкой. 72 мс (p <0.01). Не было существенной разницы между временем появления дополнительной активности, вызванной краем или центром фигуры (p> 0,05).
Активность отдельных единиц в V1 во время текстурной сегрегации
Мы подтвердили результаты MUA анализом активности 85 единичных единиц, выделенных методом сортировки по спайкам. Для 59 из этих клеток мы также измерили активность, вызванную краем и серой дырой.
Как и в случае с MUA, начальные единичные переходные реакции (временное окно 0–80 мс после появления стимула) были одинаковыми, независимо от того, попала ли фигура или земля в RF (рис. 4A) (N = 85, парный t-тест для всех отдельных единиц, t (84) = 1,2, p = 0,25), но мы заметили, что край вызывал немного более сильный ответ, чем фон (N = 59, парные t -тест для всех отдельных единиц, для которых был представлен краевой стимул, t (58) = 2,1, p = 0,04). Как и ожидалось, активность V1 отражала организацию фигура-фон во время более поздней фазы устойчивого ответа (80–300 мс, рис. 4B). Теперь край вызывал больше активности, чем фон (N = 59, парный t-тест, t (58) = 5,6, p <0.001), и фигура также вызвала большую активность, чем фон (N = 85, парный t-критерий для всех отдельных единиц, t (84) = 5,0, p <0,001).
4A) (N = 85, парный t-тест для всех отдельных единиц, t (84) = 1,2, p = 0,25), но мы заметили, что край вызывал немного более сильный ответ, чем фон (N = 59, парные t -тест для всех отдельных единиц, для которых был представлен краевой стимул, t (58) = 2,1, p = 0,04). Как и ожидалось, активность V1 отражала организацию фигура-фон во время более поздней фазы устойчивого ответа (80–300 мс, рис. 4B). Теперь край вызывал больше активности, чем фон (N = 59, парный t-тест, t (58) = 5,6, p <0.001), и фигура также вызвала большую активность, чем фон (N = 85, парный t-критерий для всех отдельных единиц, t (84) = 5,0, p <0,001).
Рисунок модуляции земли одиночных нейронов V1. ( A ) Сравнение скоростей стрельбы отдельных единиц в V1 в течение раннего временного окна (0–80 мс), вызванное центром фигуры и фоном (слева, N = 85), и выявленное краем фигуры и фоном ( справа, N = 59). Красными точками показаны нейроны, для которых ответ значительно различается (p <0.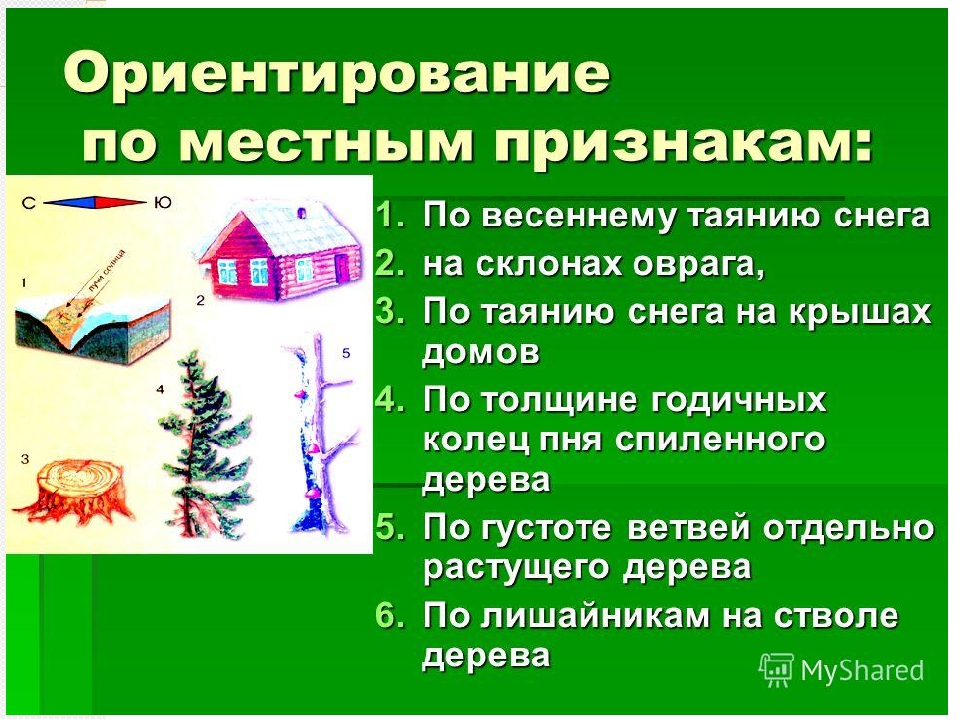 05). ( B ) То же, что и A, но в более позднем временном окне (80–300 мс). ( C ) Средний ответ V1 отдельных единиц (N = 59). Перед усреднением активность отдельных нейронов нормализовали, сначала вычитая базовую активность, а затем деля на пиковый ответ в основных условиях. Фиолетовая кривая иллюстрирует временной ход модуляции «фигура-фон», которая представляет собой разницу между активностью, вызванной фигурой и фоном (то есть синяя минус красная кривая).Зеленая кривая показывает средний отклик на состояние отверстия. Горизонтальные линии над осью x иллюстрируют раннее (светло-коричневый, 0–80 мс) и позднее временные окна (темно-коричневый, 80–300 мс), использованные в анализе. ( D ) Единичный ответ на предъявление стимулов грунта и скважины во время переходной (ось y) и устойчивой фазы (ось x) (N = 59).
05). ( B ) То же, что и A, но в более позднем временном окне (80–300 мс). ( C ) Средний ответ V1 отдельных единиц (N = 59). Перед усреднением активность отдельных нейронов нормализовали, сначала вычитая базовую активность, а затем деля на пиковый ответ в основных условиях. Фиолетовая кривая иллюстрирует временной ход модуляции «фигура-фон», которая представляет собой разницу между активностью, вызванной фигурой и фоном (то есть синяя минус красная кривая).Зеленая кривая показывает средний отклик на состояние отверстия. Горизонтальные линии над осью x иллюстрируют раннее (светло-коричневый, 0–80 мс) и позднее временные окна (темно-коричневый, 80–300 мс), использованные в анализе. ( D ) Единичный ответ на предъявление стимулов грунта и скважины во время переходной (ось y) и устойчивой фазы (ось x) (N = 59).
Мы представили стимул отверстия, чтобы контролировать размещение фигуры в воспринимающем поле каждой клетки, зарегистрированном с помощью ламинарного зонда. Если решетка, окружающая отверстие, попадет в рецептивное поле, это должно увеличить скорость активации нейронов во время окна раннего ответа. Тем не менее, мы не наблюдали столь раннего увеличения скорости стрельбы отдельной единицы населения (N = 59, рис. 4C, D). Однако стимул дырки действительно вызывал отсроченный ответ отдельных единиц, с силой и течением времени, которые были удивительно похожи на разницу в активности, вызванную фигурой и фоном (рис. 4С). Эта отложенная активация была значимой для 25 из 59 единичных единиц (t-критерий, p <0.05) (рис. 4D). Реакция на отверстие также была значимой на уровне популяции (N = 59, t (58) = 3,9, p <0,001, рис. 4D).
Если решетка, окружающая отверстие, попадет в рецептивное поле, это должно увеличить скорость активации нейронов во время окна раннего ответа. Тем не менее, мы не наблюдали столь раннего увеличения скорости стрельбы отдельной единицы населения (N = 59, рис. 4C, D). Однако стимул дырки действительно вызывал отсроченный ответ отдельных единиц, с силой и течением времени, которые были удивительно похожи на разницу в активности, вызванную фигурой и фоном (рис. 4С). Эта отложенная активация была значимой для 25 из 59 единичных единиц (t-критерий, p <0.05) (рис. 4D). Реакция на отверстие также была значимой на уровне популяции (N = 59, t (58) = 3,9, p <0,001, рис. 4D).
Ламинарный профиль модуляции «фигура-фон»
Преимущество MUA перед единичной активностью состоит в том, что мы можем измерить надежные ответы на большинстве участков записи, что позволило нам изучить ламинарный профиль активности V1. Сначала мы исследовали средний ламинарный профиль визуально управляемой активности, оценивая реакцию MUA после выравнивания глубины всех проникновений в соответствии с их профилем CSD, вызванным наземным стимулом (см. Методы) (рис.5А, слева), а затем усредняют активность на уровне корковой глубины по всем проникновениям. Переходный отклик был почти одновременным по всем слоям, и можно видеть, что устойчивая скорость стрельбы была самой высокой в глубоких слоях, особенно в слое 6, тогда как отклик в поверхностных слоях был более кратковременным и после этого подавлялся (Рис. 5A, в середине) . Затем мы исследовали ламинарный профиль модуляции фигуры и фона, то есть разницу между реакцией, вызванной фигурой и фоном (рис.5B, левая панель) с использованием дисперсионного анализа с повторными измерениями для 29 проникновений со слоем факторов (L2 / 3, L4, L5 и L6) во время фазы устойчивого ответа. Был основной эффект слоя (F (1,36, 38,1) = 6,4, p = 0,009). Апостериорные тесты показали, что модуляция «фигура-фон» в слое 5 была слабее, чем в слое 2/3 (p = 0,017) и слое 4 (p = 0,025). Разница в активности, вызванная краем и фоном (рис. 5B, правая панель), соответствовала той же схеме (F (1,76, 35,3) = 27,3, p <0.
Методы) (рис.5А, слева), а затем усредняют активность на уровне корковой глубины по всем проникновениям. Переходный отклик был почти одновременным по всем слоям, и можно видеть, что устойчивая скорость стрельбы была самой высокой в глубоких слоях, особенно в слое 6, тогда как отклик в поверхностных слоях был более кратковременным и после этого подавлялся (Рис. 5A, в середине) . Затем мы исследовали ламинарный профиль модуляции фигуры и фона, то есть разницу между реакцией, вызванной фигурой и фоном (рис.5B, левая панель) с использованием дисперсионного анализа с повторными измерениями для 29 проникновений со слоем факторов (L2 / 3, L4, L5 и L6) во время фазы устойчивого ответа. Был основной эффект слоя (F (1,36, 38,1) = 6,4, p = 0,009). Апостериорные тесты показали, что модуляция «фигура-фон» в слое 5 была слабее, чем в слое 2/3 (p = 0,017) и слое 4 (p = 0,025). Разница в активности, вызванная краем и фоном (рис. 5B, правая панель), соответствовала той же схеме (F (1,76, 35,3) = 27,3, p <0. 001). Апостериорные тесты показали, что модуляция от края до края в слое 2/3 и слое 4 была сильнее, чем в слоях 5 и 6 (все ps <0,001), в то время как модуляция в слое 6 была слабее, чем в слое 5 (p <0,01).
001). Апостериорные тесты показали, что модуляция от края до края в слое 2/3 и слое 4 была сильнее, чем в слоях 5 и 6 (все ps <0,001), в то время как модуляция в слое 6 была слабее, чем в слое 5 (p <0,01).
Ламинарный профиль модуляции фона фигуры V1 MUA. (A ) Ламинарный профиль ответа MUA, вызванный однородной решеткой (слева) и стимулом с серым отверстием (справа). Ось X, время; Ось Y, ламинарная глубина. На средней панели сравнивается реакция, вызванная землей в поверхностных и глубоких слоях.Видно, что в глубоких слоях активность более устойчива. ( B ) Ламинарный профиль модуляции фигуры и фона, то есть разница в активности, вызванная фигурой и фоном (слева) и краем и фоном (справа). Средняя активность по слоям показана на панели выше, а модуляция «фигура-фон» — красным. Правые панели, средние значения d ‘во время фазы устойчивого ответа (80–300 мс) в разных слоях.
Мы также исследовали ламинарный профиль отложенных ответов, вызванных кольцевым стимулом («серая дыра» рис.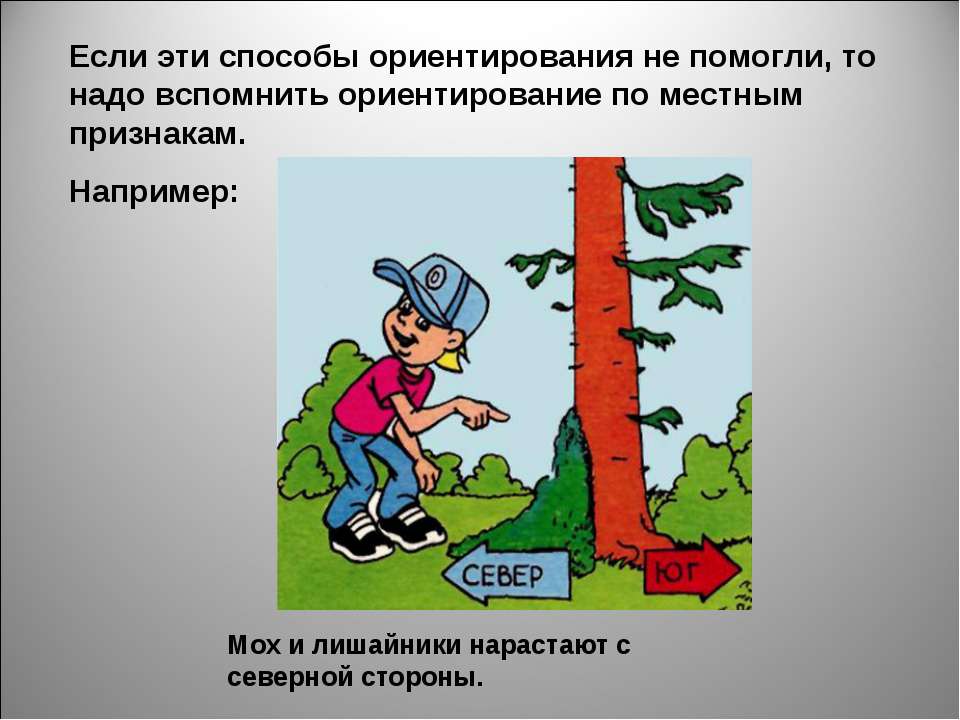 2E и 5A, справа).Эта активность происходила во всех слоях с синхронизацией, которая напоминала синхронизацию модуляции фигура-фон. Чтобы изучить возможные различия между слоями, мы выполнили ANOVA с повторными измерениями. Был основной эффект слоя (F (1, 21) = 8,7, p <0,01) с более слабой активностью в слое 2/3, чем в других слоях (все ps <0,05). Этот ламинарный профиль отличался от наблюдаемого для модуляции "фигура-фон", которая была относительно сильной в слоях 2/3 (рис. 5B).
2E и 5A, справа).Эта активность происходила во всех слоях с синхронизацией, которая напоминала синхронизацию модуляции фигура-фон. Чтобы изучить возможные различия между слоями, мы выполнили ANOVA с повторными измерениями. Был основной эффект слоя (F (1, 21) = 8,7, p <0,01) с более слабой активностью в слое 2/3, чем в других слоях (все ps <0,05). Этот ламинарный профиль отличался от наблюдаемого для модуляции "фигура-фон", которая была относительно сильной в слоях 2/3 (рис. 5B).
Профиль плотности источника тока по слоям
Мы вычислили профиль CSD, потому что сток тока в CSD показывает, где ток течет в нейроны и, следовательно, в слои предполагаемых возбуждающих синаптических входов.Чтобы определить визуально управляемые синаптические входы, мы исследовали CSD, вызванный возникновением фоновой решетки в рецептивном поле нейронов (рис. 6A, слева). Чтобы оценить значимость стоков и источников, мы использовали метод, основанный на t-тестах кластеризации (рис. 6A, справа) (Self et al . 2013). Визуально управляемый ответ вызвал сильное и раннее снижение в L2 / 3 и L4, за которым последовал еще один сток в L5 (рис. 6A). Затем мы исследовали разницу между CSD, вызванными стимулами фигуры и фона, чтобы изучить местоположение и время предполагаемых синаптических входов, которые отвечают за дополнительную импульсную активность, вызываемую фигурой (рис.5Б). Фигура вызвала дополнительный сток в L2 / 3, начинающийся примерно через 70 мс после начала стимула, который сопровождался источником в слое 5. Время этого стока совпало с эффектом организации фигура-фон на пиковой активности. Разница CSD между краем и фоном была почти идентична разнице между центром фигуры и фоном (рис. 6C).
2013). Визуально управляемый ответ вызвал сильное и раннее снижение в L2 / 3 и L4, за которым последовал еще один сток в L5 (рис. 6A). Затем мы исследовали разницу между CSD, вызванными стимулами фигуры и фона, чтобы изучить местоположение и время предполагаемых синаптических входов, которые отвечают за дополнительную импульсную активность, вызываемую фигурой (рис.5Б). Фигура вызвала дополнительный сток в L2 / 3, начинающийся примерно через 70 мс после начала стимула, который сопровождался источником в слое 5. Время этого стока совпало с эффектом организации фигура-фон на пиковой активности. Разница CSD между краем и фоном была почти идентична разнице между центром фигуры и фоном (рис. 6C).
Анализ CSD. ( A ) слева, профиль CSD, вызванный фоновым стимулом. Стоки показаны теплыми цветами, а источники — холодными, значения указаны в мкВ / см2.Граница между слоями 4 и 5 была определена как нижняя граница раннего опускания с четким разворотом, видимым на глубине, обозначенной как 0.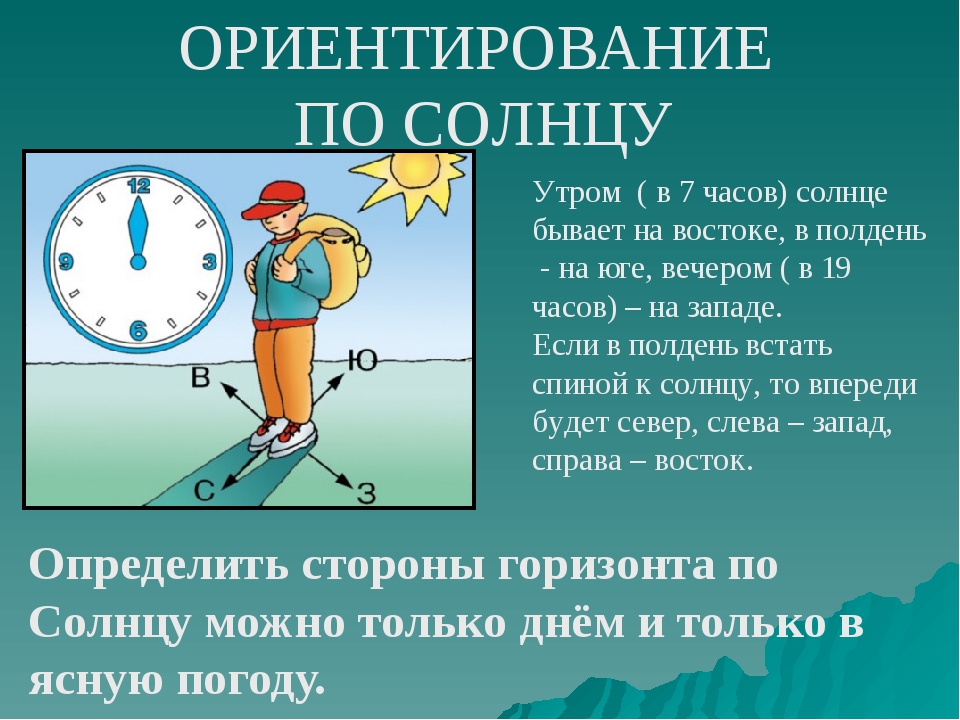 Справа, мы определили значимость стоков и источников, используя метод, основанный на t-критериях кластеризации ( см. Методы). Значительные (p <0,05) поглотители показаны теплыми цветами, а значимые источники - холодными, цвет указывает t-значение. Все стоки и источники, которые видны на левой панели, оказались значительными. ( B ) Различие в профиле CSD, вызванное фигурой и фоном.Обратите внимание, что этот рисунок связан с дополнительным стоком в слое 2/3, который совпадает с увеличением пиковой активности. ( C ) Разница в CSD между краем и фоном. Ламинарный профиль аналогичен профилю панели B, но в слое 2/3 край вызывает более сильное погружение. ( D ) Ламинарный профиль CSD, вызванный решеточным стимулом с серым отверстием в области RF. Обратите внимание на начальный сток в слое 5, за которым следует профиль CSD, напоминающий профиль на панели B.
Справа, мы определили значимость стоков и источников, используя метод, основанный на t-критериях кластеризации ( см. Методы). Значительные (p <0,05) поглотители показаны теплыми цветами, а значимые источники - холодными, цвет указывает t-значение. Все стоки и источники, которые видны на левой панели, оказались значительными. ( B ) Различие в профиле CSD, вызванное фигурой и фоном.Обратите внимание, что этот рисунок связан с дополнительным стоком в слое 2/3, который совпадает с увеличением пиковой активности. ( C ) Разница в CSD между краем и фоном. Ламинарный профиль аналогичен профилю панели B, но в слое 2/3 край вызывает более сильное погружение. ( D ) Ламинарный профиль CSD, вызванный решеточным стимулом с серым отверстием в области RF. Обратите внимание на начальный сток в слое 5, за которым следует профиль CSD, напоминающий профиль на панели B.
Ответ CSD, вызванный стимулом с серой дырой над RF, был другим (рис. 6D). Все началось со спада в слое 5, где пиковая активность также была относительно сильной (рис. 5A), предполагая, что слой 5 может получать входные данные от окружающих областей коры в V1 и / или более высоких областях, представляющих решетку. Интересно, что за этим начальным стоком последовал сток в слое 2/3, который затем двинулся вниз к слою 5, напоминая разницу между CSD, вызванными фигурой и фоном (рис.6Б). Заметная разница в CSD между фоновой решеткой (рис. 6A), которая вызвала типичный ответ с прямой связью от LGN, и стимулом отверстия (рис. 6D), который этого не сделал, подтверждает, что отверстие было хорошо отцентрировано на RF. (Рис. 3D), чтобы решетка не заходила в ВЧ.
5A), предполагая, что слой 5 может получать входные данные от окружающих областей коры в V1 и / или более высоких областях, представляющих решетку. Интересно, что за этим начальным стоком последовал сток в слое 2/3, который затем двинулся вниз к слою 5, напоминая разницу между CSD, вызванными фигурой и фоном (рис.6Б). Заметная разница в CSD между фоновой решеткой (рис. 6A), которая вызвала типичный ответ с прямой связью от LGN, и стимулом отверстия (рис. 6D), который этого не сделал, подтверждает, что отверстие было хорошо отцентрировано на RF. (Рис. 3D), чтобы решетка не заходила в ВЧ.
Total-Text: к устойчивости ориентации при обнаружении текста сцены
Карацас, Д., Шафайт, Ф., Учида, С., Ивамура, М., и Бигорда, Л.Г., Местре, SR, Мас, Дж. ., Мота Д.Ф., Алмазан, Дж. А., Де Лас Херас, Л.П .: Жесткое соревнование по чтению ICDAR 2013. В: 12-я Международная конференция по анализу и распознаванию документов (ICDAR). 37 (7), pp. 1484–1493 (2013)
37 (7), pp. 1484–1493 (2013)
Яо, К., Бай, X., Лю, В., Ма, Й., Ту, З .: Обнаружение текстов произвольной ориентации в естественные изображения. В: Конференция IEEE по компьютерному зрению и распознаванию образов, стр. 1083–1090 (2012)
Е. К., Дурманн Д.: Обнаружение и распознавание текста в изображениях: обзор.IEEE Trans. Pattern Anal. Мах. Intell. 37 (7), 1480–1500 (2015)
Артикул Google ученый
Чжан, З., Шен, В., Яо, К., Бай, X .: Обнаружение текстовых строк на основе симметрии в естественных сценах. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 2558–2567 (2015)
 org/ScholarlyArticle»> 5.
org/ScholarlyArticle»> 5.Huang, W., Lin, Z., Yang, J., Wang, J .: Text localization в естественных изображениях с помощью преобразования функции штрихов и дескрипторов ковариации текста.В: Proceedings of the IEEE International Conference on Computer Vision, pp. 1241–1248 (2013)
Neumann, L., Matas, J .: Локализация и распознавание текста сцены с ориентированным обнаружением штрихов. В: Proceedings of the IEEE International Conference on Computer Vision, pp. 97–104 (2013)
Huang, W., Qiao, Y., Tang, X .: Надежное обнаружение текста сцены с помощью сверточной нейронной сети, индуцированной деревья мзер. В: Европейская конференция по компьютерному зрению, стр. 497–511 (2014)
Google ученый
 org/ScholarlyArticle»> 8.
org/ScholarlyArticle»> 8.Пан, Ю.-Ф., Хоу, X., Лю, К.-Л .: Гибридный подход к обнаружению и локализации текста в изображениях естественной сцены. IEEE Trans. Процесс изображения. 20 (3), 800–813 (2011)
MathSciNet Статья Google ученый
Каратсас, Д., Гомес-Бигорда, Л., Николау, А., Гош, С., Багданов, А., Ивамура, М., Матас, Дж., Нойман, Л., Чандрасекхар, В.Р., Лу, С., Шафайт, Ф. (2015) Конкурс ICDAR 2015 по устойчивому чтению. В: 13-я Международная конференция по анализу и распознаванию документов (ICDAR), стр.1156–1160
Вейт, А., Матера, Т., Нойман, Л., Матас, Дж., Белонги, С.: Coco-text: набор данных и эталонный тест для обнаружения и распознавания текста в естественных изображениях ( 2016). Препринт arXiv arXiv: 1601. 07140
07140
Гупта, А., Ведальди, А., Зиссерман, А .: Построение модели чтения скорописи на основе восприятия. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 2315–2324 (2016)
Ch’ng, C.К., Чан, К.С.: Total-Text: исчерпывающий набор данных для обнаружения и распознавания текста сцены. В: IEEE 14th IAPR International Conference on Document Analysis and Recognition (ICDAR), vol. 1, pp. 935–942 (2017)
Лю, Й., Цзинь, Л., Чжан, С., Луо, К., Чжан, С.: Обнаружение изогнутого текста сцены с помощью поперечной и продольной последовательности связь. В: Распознавание образов (2019)
Статья Google ученый
 org/ScholarlyArticle»> 14.
org/ScholarlyArticle»> 14.Риснуман, А., Шивакумара, П., Чан, К.С., Тан, К.Л .: Надежная система обнаружения произвольного текста для изображений естественной сцены. Эксперт Syst. Appl. 41 (18), 8027–8048 (2014)
Артикул Google ученый
Рен, С., Хе, К., Гиршик, Р., Сан, Дж .: Быстрее R-CNN: На пути к обнаружению объектов в реальном времени с помощью сетей предложения регионов. В: Достижения в системах обработки нейронной информации, стр. 91–99 (2015).
Вольф, К., Джолион, Дж. М.: Графики количества объектов / площади для оценки алгоритмов обнаружения и сегментации объектов. Int. J. Doc. Анальный. Признать. (ИДАР). 8 (4), 280–296 (2006)
Артикул Google ученый
 org/ScholarlyArticle»> 17.
org/ScholarlyArticle»> 17.Карацас, Д., Гомес, Л., Николау, А., Русиньол, М .: Надежная платформа для аннотаций и оценки соревнований по чтению. В: 13-й Международный семинар IAPR по системам анализа документов (DAS), стр.61–66 (2018)
Инь, X.C., Пей, W.Y., Чжан, Дж., Хао, Х.У .: Обнаружение текста в многоориентационной сцене с адаптивной кластеризацией. IEEE Trans. Pattern Anal. Мах. Intell. 37 (9), 1930–1937 (2015)
Артикул Google ученый
Nayef, N., Yin, F., Bizid, I., Choi, H., Feng, Y., Karatzas, D., Luo, Z, et al.: ICDAR2017 надежное задание для чтения на мульти -языковое обнаружение текста сцены и идентификация сценария-RRC-MLT.В: IEEE 14th IAPR International Conference on Document Analysis and Recognition (ICDAR), vol. 1 стр. 1454–1459 (2017)
1 стр. 1454–1459 (2017)
Ши, Б., Яо, К., Ляо, М., Ян, М., Сюй, П., Цуй, Л., Белонги, С., Лу С., Бай Х .: Конкурс ICDAR2017 по чтению китайских текстов в условиях дикой природы (RCTW-17). В: IEEE 14th IAPR International Conference on Document Analysis and Recognition (ICDAR), vol. 1 стр. 1429–1434 (2017)
Хэ, М., Лю, Ю., Ян, З., Чжан, С., Ло, К., Гао, Ф., Zheng, Q., Wang, Y., Zhang, X., Jin, L .: Конкурс ICPR2018 по надежному чтению разнотипных веб-изображений. В: 24-я Международная конференция по распознаванию образов (ICPR), 2018, стр. 7–12 (2018)
Эпштейн, Б., Офек, Э., Векслер, Ю.: Обнаружение текста в естественных сценах с шириной штриха преобразовать. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp.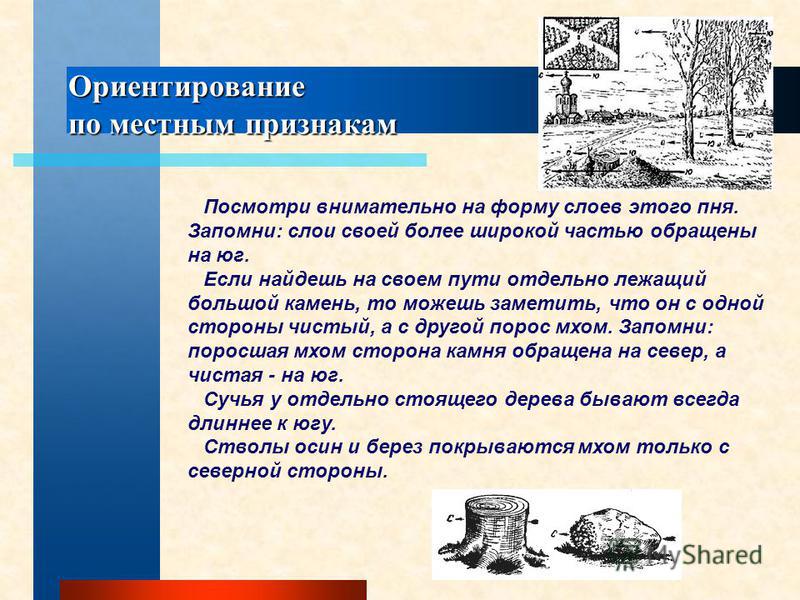 2963–2970 (2010)
2963–2970 (2010)
Matas, J., Chum, O., Urban, M., Pajdla, T .: Robust Wide -базовое стерео из максимально устойчивых экстремальных областей.In: Image and Vision Computing, pp. 761–767 (2004)
Статья Google ученый
Ван, Т., Ву, Д.Дж., Коутс, А., Нг, А.Й .: Сквозное распознавание текста с помощью сверточных нейронных сетей. В: Международная конференция по распознаванию образов, стр. 3304–3308 (2012)
Ядерберг М., Ведальди А., Зиссерман А .: Глубокие особенности для выделения текста. В: European Conference on Computer Vision, pp. 512–528 (2014)
. Google ученый
 org/ScholarlyArticle»> 26.
org/ScholarlyArticle»> 26.He, T., Huang, W., Qiao, Y., Yao, J .: Сверточная нейронная сеть с ориентацией на текст для обнаружения текста сцены. IEEE Trans. Процесс изображения. 25 (6), 2529–2541 (2016)
MathSciNet Статья Google ученый
Zhang, Z., Zhang, C., Shen, W., Yao, C., Liu, W., Bai, X .: многоориентированное обнаружение текста с полностью сверточными сетями. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp.4159–4167 (2016)
Лонг, Дж., Шелхамер, Э., Даррелл, Т .: Полностью сверточные сети для семантической сегментации. В: Материалы конференции IEEE по компьютерному зрению и распознаванию образов, стр. 3431–3440 (2015)
 org/ScholarlyArticle»> 29.
org/ScholarlyArticle»> 29.Хэ Т., Хуан В., Цяо Ю., Яо Дж .: Точный текст локализация в естественном изображении с помощью каскадной сверточной текстовой сети (2016). Препринт arXiv arXiv: 1603.09423
Tang, Y., Wu, X .: Обнаружение и сегментация текста сцены на основе нейронных сетей с каскадной сверткой.IEEE Trans. Процесс изображения. 26 (3), 1509–1520 (2017)
Артикул Google ученый
Гиршик, Р., Донахью, Дж., Даррелл, Т., Малик, Дж .: Богатые иерархии функций для точного обнаружения объектов и семантической сегментации. В: Материалы конференции IEEE по компьютерному зрению и распознаванию образов, стр. 580–587 (2014)

Гиршик, Р .: Fast R-CNN. В: Материалы Международной конференции IEEE по компьютерному зрению, стр.1440–1448 (2015)
Цзян, Ю., Чжу, X., Ван, X., Ян, С., Ли, В., Ван, Х., Фу, П., Ло, З. .: R2CNN: CNN области вращения для надежного определения текста сцены с ориентацией (2017). Препринт arXiv arXiv: 1706.09579
Ma, J., Shao, W., Ye, H., Wang, L., Wang, H., Zheng, Y., Xue, X: обнаружение произвольно ориентированного текста сцены с помощью предложений поворота . IEEE Trans. Мультимед. 20 , 3111–3122 (2018)
Артикул Google ученый
Лю В., Ангуэлов Д., Эрхан Д., Сегеди К., Рид С., Фу С. Ю., Берг А. К.: SSD: одноразовый мультиблок-детектор. В: European Conference on Computer Vision, pp. 21–37 (2016)
В: European Conference on Computer Vision, pp. 21–37 (2016)
. Google ученый
Редмон Дж., Диввала С., Гиршик Р., Фархади А .: Вы смотрите только один раз: единое обнаружение объектов в реальном времени. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 779–788 (2016)
Лю Ю., Цзинь, Л .: Глубокое соответствие предшествующей сети: к более точному многоориентированному обнаружению текста. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 3454–3461 (2017)
Shi, B., Bai, X., Belongie, S .: Обнаружение ориентированного текста в естественных изображениях с помощью связывание сегментов.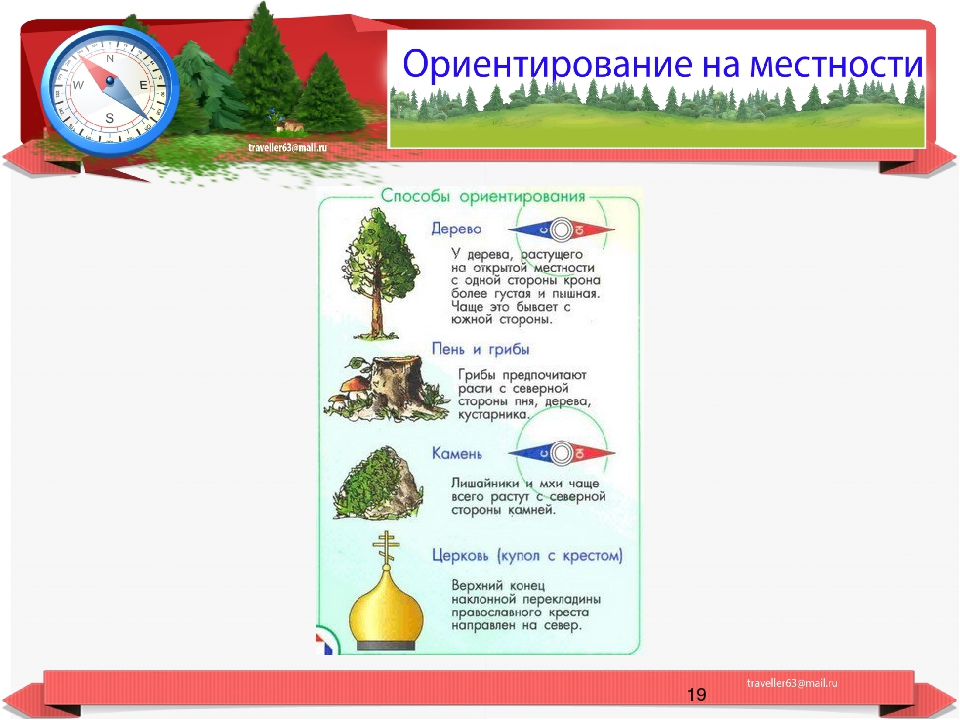 В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (2017)
В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (2017)
Liao, M., Shi, B., Bai, X., Wang, X., Liu, W .: TextBoxes: a быстрый детектор текста с единственной глубокой нейронной сетью.В: AAAI, pp. 4161–4167 (2017)
Ляо, Минхуэй, Ши, Баогуанг, Бай, Сян и: TextBoxes ++: детектор текста сцены, ориентированный на одиночный снимок. IEEE Transactions по обработке изображений 27 (8), 3676–3690 (2018)
MathSciNet Статья Google ученый
Хэ В., Чжан X.Y., Инь Ф., Лю К.Л .: Глубокая прямая регрессия для многоориентированного обнаружения текста в сценах. В: Материалы Международной конференции IEEE по компьютерному зрению (2017)
 org/Book»> 42.
org/Book»> 42.Адамс-младший, Р. Б., Адамс, Р. Б., Амбади, Н., Симодзё, С., Накаяма, К. (ред.): Наука социального видения: наука социального видения, т. 7. Oxford University Press, Oxford (2011)
Google ученый
Яо, К., Бай, X., Сан, Н., Чжоу, X., Чжоу, С., Цао, З .: Обнаружение текста сцены посредством целостного многоканального предсказания (2016). Препринт arXiv arXiv: 1606.09002
Сюй, Ю., Ван, Ю., Чжоу, В., Wang, Y., Yang, Z., Bai, X .: TextField: изучение поля глубокого направления для обнаружения нерегулярного текста сцены. Пер. Процесс изображения. (2019)
Лю, П., Ляо, М., Яо, К., Ву, В., Бай, Х .: Masktextpotter: сквозная обучаемая нейронная сеть для выделения текста произвольной формы.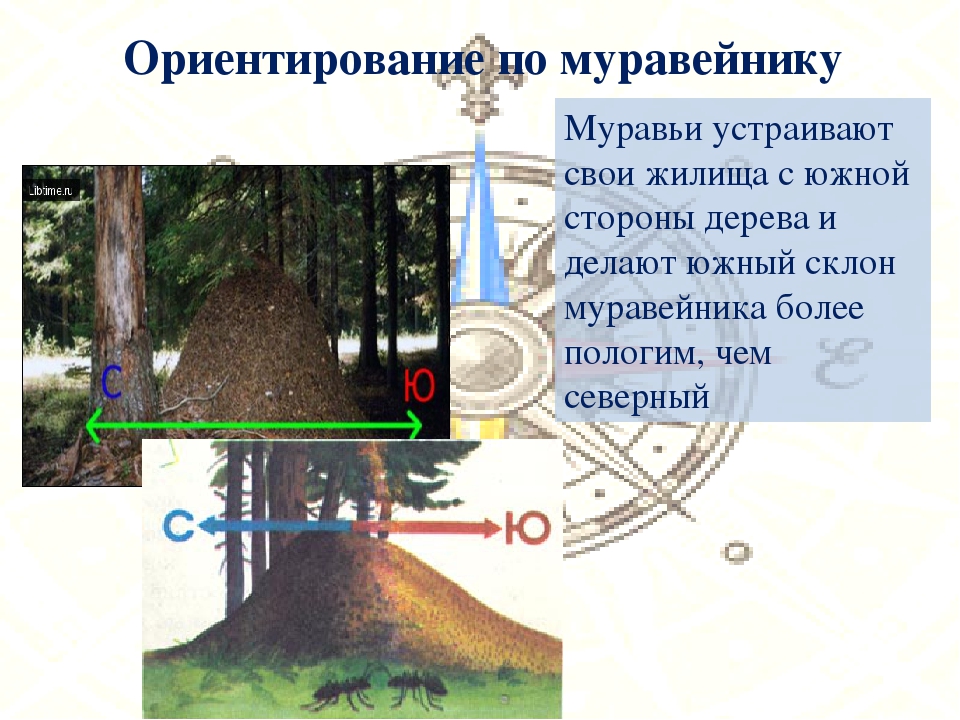 В: Proceedings of the European Conference on Computer Vision (ECCV), pp. 67–83 (2018)
В: Proceedings of the European Conference on Computer Vision (ECCV), pp. 67–83 (2018)
Google ученый
Сюэ, К., Лу, С., Чжан, В .: MSR: многомасштабная регрессия формы для обнаружения текста сцены (2019). Препринт arXiv arXiv: 1901.02596
Castrejón, L., Kundu, K., Urtasun, R., Fidler, S .: Аннотирование экземпляров объектов с помощью многоугольной RNN. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, vol. 1, стр. 2 (2017)
Хуанг, Дж., Ратод, В., Сун, Ч., Чжу, М., Кораттикара, А., Фатхи, А., Фишер, И., Война, З., Сонг, Ю., Гвадаррама, С., Мерфи, К.: Компромисс между скоростью и точностью для современных детекторов сверточных объектов. В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, vol. 4 (2017)
В: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, vol. 4 (2017)
Сегеди, К., Иоффе, С., Ванхаук, В., Алеми, А.А .: Inception-v4, inception-resnet и влияние остаточных связей на обучение. AAAI 4 , 12 (2017)
Google ученый
Лю, X., Liang, D., Yan, S., Chen, D., Qiao, Y., Ян, Дж .: Fots: быстрое ориентированное распознавание текста с помощью единой сети. В: Материалы конференции IEEE по компьютерному зрению и распознаванию образов, стр. 5676–5685 (2018)
Сунь, Ю., Чжан, К., Хуанг, З., Лю, Дж., Хан, Дж., Дин, Э .: TextNet: нерегулярное чтение текста с изображений с помощью сквозной обучаемой сети. В: Азиатская конференция по компьютерному зрению (2018)
В: Азиатская конференция по компьютерному зрению (2018)
Long, S., Ruan, J., Zhang, W., He, X., Wu, W., Yao, C .: Textsnake: гибкий представление для обнаружения текста произвольной формы In: Proceedings of the European Conference on Computer Vision (ECCV), pp.20–36 (2018)
Google ученый
Дай, Ю., Хуан, З., Гао, Ю., Сюй, Ю., Чен, К., Го, Дж., Цю, В .: Сети сегментации слитного текста для многоориентированной сцены обнаружение текста. В: Proceedings of the IEEE International Conference on Pattern Recognition (ICPR), pp. 3604–3609 (2018)
He, K., Gkioxari, G., Dollár, P., Girshick, R .: Mask Р-CNN. В: Proceedings of the IEEE International Conference on Computer Vision (ICCV), pp.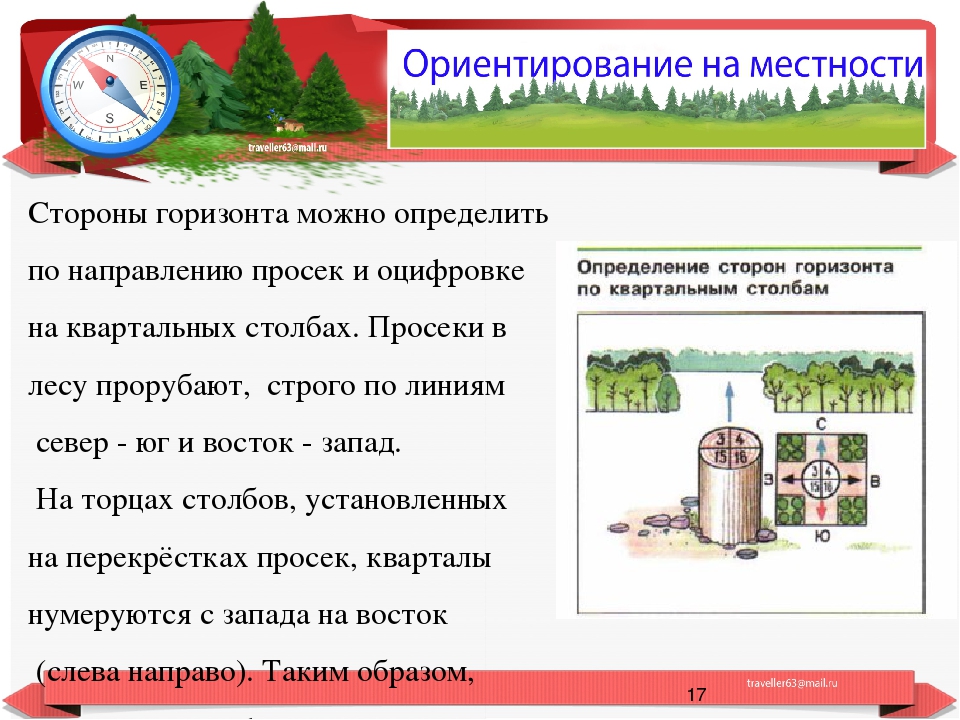 2961–2969 (2018)
2961–2969 (2018)
Инвариантные к повороту функции для обнаружения многоориентированного текста в естественных изображениях
Существует большое количество систем, имеющих дело с обнаружением текста в естественных изображениях и видео [4] — [18], [ 24] — [28]. Подробные обзоры можно найти в [29], [30]. Существующие подходы к обнаружению текста можно условно разделить на три категории: методы на основе текстур, на основе компонентов и гибридные методы.
Три категории существующих подходов.
Методы на основе текстуры (e.грамм. [6], [7], [24]) рассматривают текст как особый тип текстуры и используют его текстурные свойства, такие как локальная интенсивность, пространственная дисперсия, характеристики фильтра и вейвлет-коэффициенты. Как правило, эти методы требуют вычислений, поскольку все местоположения и масштабы тщательно сканируются. Более того, эти алгоритмы в основном обнаруживают только горизонтальные тексты.
В ранней работе Zhong et al. [31] предложил метод локализации текста в цветных изображениях. Горизонтальная пространственная дисперсия использовалась для грубой локализации текста, а цветовая сегментация была выполнена в локализованных областях для извлечения текстовых компонентов.Система Wu et al. [32] принял набор гауссовских производных для сегментации текстов. Прямоугольные блоки, окружающие соответствующие текстовые строки, были сформированы на основе определенных эвристических правил для текстовых строк, таких как подобие высоты, интервал и выравнивание. Вышеупомянутые шаги были применены к пирамиде изображений, и результаты были объединены для окончательного обнаружения. Ли и др. [33] представил систему для обнаружения и отслеживания текстов в цифровом видео. В этой системе в качестве локальных характеристик используются средние значения и центральные моменты второго и третьего порядков откликов вейвлет-разложения.Чжун и др. [34] предложил локализовать потенциальные области текста подписи непосредственно в сжатой области дискретного косинусного преобразования (DCT), используя информацию об изменении интенсивности, закодированную в области DCT.
[31] предложил метод локализации текста в цветных изображениях. Горизонтальная пространственная дисперсия использовалась для грубой локализации текста, а цветовая сегментация была выполнена в локализованных областях для извлечения текстовых компонентов.Система Wu et al. [32] принял набор гауссовских производных для сегментации текстов. Прямоугольные блоки, окружающие соответствующие текстовые строки, были сформированы на основе определенных эвристических правил для текстовых строк, таких как подобие высоты, интервал и выравнивание. Вышеупомянутые шаги были применены к пирамиде изображений, и результаты были объединены для окончательного обнаружения. Ли и др. [33] представил систему для обнаружения и отслеживания текстов в цифровом видео. В этой системе в качестве локальных характеристик используются средние значения и центральные моменты второго и третьего порядков откликов вейвлет-разложения.Чжун и др. [34] предложил локализовать потенциальные области текста подписи непосредственно в сжатой области дискретного косинусного преобразования (DCT), используя информацию об изменении интенсивности, закодированную в области DCT. Метод, предложенный Gllavata et al. [24] использовал распределение высокочастотных вейвлет-коэффициентов для статистической характеристики текстовых и нетекстовых областей.
Метод, предложенный Gllavata et al. [24] использовал распределение высокочастотных вейвлет-коэффициентов для статистической характеристики текстовых и нетекстовых областей.
В отличие от методов, рассмотренных выше, в которых в качестве признаков используются характеристики фильтра или коэффициенты области преобразования, алгоритм Kim et al. [6] полагается только на интенсивность необработанных пикселей. Классификатор машины опорных векторов (SVM) обучен генерировать карты вероятностей, в которых позиции и экстенты текстов ищутся с использованием адаптивного среднего сдвига. Lienhart и Wernicke [35] использовали комплексные карты ориентации краев, вычисленные из исходного изображения RGB, как функции и обученную нейронную сеть, чтобы различать текстовые и нетекстовые шаблоны.
Метод Weinman et al. [36] использовал богатое представление, которое фиксирует важные отношения между ответами на различные фильтры, выбирающие масштаб и ориентацию. Для повышения производительности использовалось условное случайное поле (CRF), чтобы использовать зависимости между метками соседних областей изображения. Основываясь на наблюдении, что области с высокой плотностью краев указывают на текстовые области, обнаружение текста в [37] было выполнено в парадигме последовательного мульти-разрешения.
Для повышения производительности использовалось условное случайное поле (CRF), чтобы использовать зависимости между метками соседних областей изображения. Основываясь на наблюдении, что области с высокой плотностью краев указывают на текстовые области, обнаружение текста в [37] было выполнено в парадигме последовательного мульти-разрешения.
Чтобы ускорить обнаружение текста, Chen et al. [7] предложил эффективный детектор текста, который представляет собой каскадный классификатор Adaboost. Слабые классификаторы обучаются по набору информативных характеристик, включая среднее значение и дисперсию интенсивности, горизонтальные и вертикальные производные и гистограммы градиента интенсивности.Недавно Wang et al. [10] представляет метод определения слов на естественных изображениях. Сначала они обнаруживают символы для каждой буквы в алфавите, а затем оценивают оценки конфигурации для слов в указанном списке, чтобы выбрать наиболее вероятное.
Компонентные методы (например, [4], [9], [14], [38]) сначала извлекают потенциальные текстовые компоненты различными способами (например, уменьшение цвета [4], [14] и обнаружение максимально стабильной экстремальной области [11], [25]), а затем удалите нетекстовые компоненты с помощью эвристических правил или обученного классификатора на основе геометрии и свойств внешнего вида. Методы на основе компонентов обычно более эффективны, чем методы на основе текстуры, потому что количество компонентов-кандидатов относительно невелико. Эти методы более устойчивы к вариациям текста, таким как изменение шрифта, масштаба и ориентации. Более того, обнаруженные текстовые компоненты можно напрямую использовать для распознавания символов. Благодаря этим преимуществам, последние достижения в области обнаружения и распознавания текста в естественных изображениях были в значительной степени продвинуты благодаря этой категории методов [9], [11], [14], [18], [38] — [40].
Методы на основе компонентов обычно более эффективны, чем методы на основе текстуры, потому что количество компонентов-кандидатов относительно невелико. Эти методы более устойчивы к вариациям текста, таким как изменение шрифта, масштаба и ориентации. Более того, обнаруженные текстовые компоненты можно напрямую использовать для распознавания символов. Благодаря этим преимуществам, последние достижения в области обнаружения и распознавания текста в естественных изображениях были в значительной степени продвинуты благодаря этой категории методов [9], [11], [14], [18], [38] — [40].
В [4] выполняется уменьшение цвета и многозначное разложение изображения для разделения входного изображения на несколько компонентов переднего плана. К этим компонентам переднего плана применяется анализ связанных компонентов, за которым следует модуль идентификации текста, чтобы отфильтровать нетекстовые компоненты.
Большой успех разреженного изображения в распознавании лиц [41] и шумоподавлении изображений [42] вдохновил многих исследователей в сообществе. Авторы [43] и [12] применяют процедуру классификации к кандидатам текстовых компонентов, используя изученные дискриминативные словари.
Авторы [43] и [12] применяют процедуру классификации к кандидатам текстовых компонентов, используя изученные дискриминативные словари.
Методы, основанные на MSER [11], [18], [25], [40], привлекли большое внимание сообщества из-за превосходных характеристик MSER (максимально устойчивые экстремальные области) [44]. MSER могут быть вычислены эффективно (почти линейная сложность) и устойчивы к шуму и аффинному преобразованию. В [11] MSER обнаруживаются и принимаются как потенциальные текстовые компоненты. Neumann et al. [40] модифицировал исходный алгоритм MSER, чтобы учесть топологию области, что привело к превосходным характеристикам обнаружения.Чен и др. [25] также предложил расширение MSER, в котором границы MSER улучшаются посредством обнаружения края, чтобы справиться с размытием изображения. Недавно Neumann et al. [18] дополнительно расширяет работу [11], [40], чтобы обеспечить обнаружение и распознавание текста в реальном времени.
Эпштейн и др. [9] предложил новый оператор изображения, называемый преобразованием ширины штриха (SWT), который преобразует данные изображения, содержащие значения цвета на пиксель, в содержащие наиболее вероятную ширину штриха.Основанный на SWT и наборе эвристических правил, этот алгоритм может надежно обнаруживать горизонтальные тексты.
[9] предложил новый оператор изображения, называемый преобразованием ширины штриха (SWT), который преобразует данные изображения, содержащие значения цвета на пиксель, в содержащие наиболее вероятную ширину штриха.Основанный на SWT и наборе эвристических правил, этот алгоритм может надежно обнаруживать горизонтальные тексты.
В то время как большинство существующих алгоритмов предназначены для горизонтального или почти горизонтального текста, Yi et al. [14] и Shivakumara et al. [16] рассматривают проблему обнаружения разноориентированного текста в изображениях или видеокадрах. После извлечения компонентов-кандидатов с использованием разделения на основе градиента и цвета, стратегия группировки строк в [14] агрегирует компоненты в текстовые строки.Текстовые строки могут быть в любом направлении. Однако метод [14] основан на большом наборе правил и порогов, определяемых вручную. В [16] кандидаты в кластеры текстовых компонентов идентифицируются с помощью K — означает кластеризацию в области Фурье-Лапласа. Кластеры компонентов делятся на отдельные компоненты с помощью скелетонизации. Несмотря на то, что этот метод может обрабатывать многоцелевые тексты, он обнаруживает только текстовые блоки, а не символы, слова или предложения.
Кластеры компонентов делятся на отдельные компоненты с помощью скелетонизации. Несмотря на то, что этот метод может обрабатывать многоцелевые тексты, он обнаруживает только текстовые блоки, а не символы, слова или предложения.
Наконец, гибридных методов (e.грамм. [13], [45]) представляют собой смесь методов на основе текстуры и методов. В [45] краевые пиксели всех возможных текстовых областей извлекаются с использованием сложного метода обнаружения краев; градиент и геометрические свойства контуров области проверяются для создания потенциальных текстовых областей, после чего следует процедура анализа текстуры, чтобы отличить истинные текстовые области от нетекстовых областей. В отличие от [45], гибридный метод, предложенный Pan et al. [13] извлекает компоненты-кандидаты из карт вероятностей в нескольких масштабах.Карты вероятности оцениваются классификатором, который обучается с использованием набора функций текстуры (функции HOG [46]), вычисленных по заранее определенным шаблонам. Как и большинство других алгоритмов, эти два метода обнаруживают только горизонтальный текст.
Как и большинство других алгоритмов, эти два метода обнаруживают только горизонтальный текст.
наземных опорных пунктов: почему они важны?
Если вы участвовали в тренинге по Pix4D или когда-либо читали сообщество Pix4D или документацию, вы наверняка слышали термин наземные контрольные точки .
Наземные контрольные точки — это «большие квадратные штуки», верно?
Верно, но они гораздо больше.
В этой статье мы расскажем, что такое наземные контрольные точки и почему они важны для проекта аэрофотосъемки.
В этом сообщенииПерейти к теме
Что такое наземная контрольная точка в фотограмметрии?
Наземные контрольные точки (или опорные точки) — это точки на земле с известными координатами .
При аэрофотосъемке опорные точки — это точки, которые геодезист может точно определить: с помощью нескольких известных координат можно точно нанести на карту большие площади.
Почему опорные точки так выглядят?
Наземными опорными точками может быть что угодно, что можно легко распознать на изображениях. Обычно они выглядят как небольшой участок шахматной доски. Форма оставляет очень мало двусмысленности относительно того, где находится «точка» наземной контрольной точки.
Обычно они выглядят как небольшой участок шахматной доски. Форма оставляет очень мало двусмысленности относительно того, где находится «точка» наземной контрольной точки.
Они почти всегда черно-белые, потому что на них легче распознать высококонтрастные узоры.
Точки могут быть измерены традиционными методами съемки, с использованием LiDAR или существующей карты — даже Google Earth.
Как создать наземные опорные точки?
Есть много способов создать свои собственные наземные контрольные точки, и теоретически опорные точки могут быть сделаны из чего угодно. Правило использования — использовать высококонтрастные цвета — вот почему наземные контрольные точки обычно черно-белые — и убедитесь, что они достаточно большие, чтобы их можно было идентифицировать с вашей конкретной высоты полета.
Лучше использовать водонепроницаемые материалы, если вы планируете использовать их снова, и используйте матовое покрытие, чтобы уменьшить блики и улучшить видимость.
Наши пользователи сделали наземные контрольные точки из бетонных столбов (потому что окрашенные опорные точки постоянно смывались дождем), виниловых полов, бейсбольных баз и картона.
Команда разработчиков Pix4Ders испекла опорные точки cookie для проверки этой теории — они хорошо работали в качестве связующих точек вручную, но поскольку мы не знали точных координат, мы не можем сказать, что модель была правильно привязана к местности.
Опорные точки, автоматические и ручные связующие точки — в чем разница?
В программном обеспечении Pix4D связующие точки — это точки, которые существуют на нескольких изображениях.Они могут быть обнаружены программным обеспечением (автоматические связующие точки) или добавлены вручную пользователем (ручные связующие точки).
Связующая точка вручную может быть любая легко идентифицируемая точка, которая появляется на нескольких изображениях, например, угол окна
Связующие точки, вручную устанавливаемые вручную, помогают повысить относительную точность проекта, но не помогают с абсолютной точностью, поскольку их расположение в космосе не определено.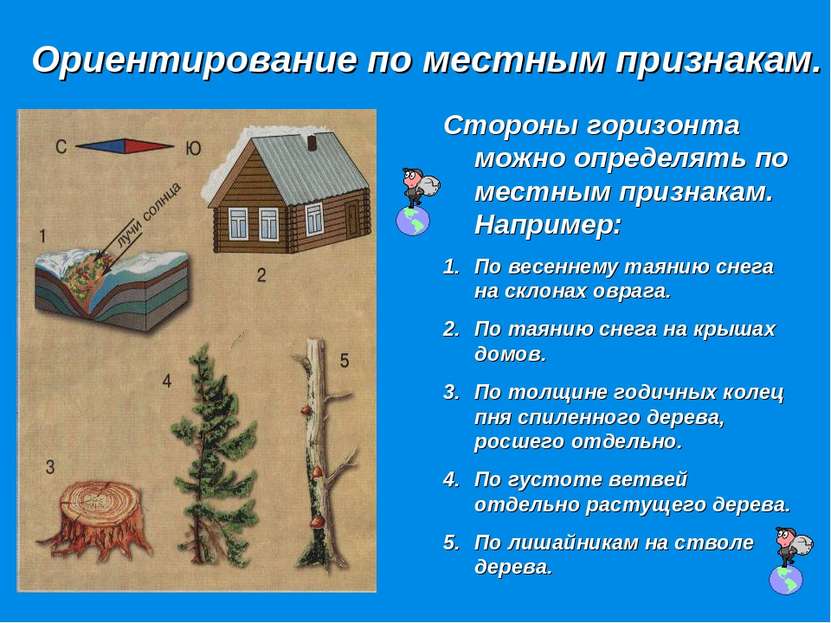
Сколько опорных точек необходимо для точной аэрофотосъемки?
Вы можете быть удивлены — независимые тесты показывают, что для получения точных результатов вам нужно меньше опорных точек, чем вы думаете.
Министерство транспорта штата Невада обнаружило, что размещение более 5-10 GCP принесло очень мало пользы.
Диаграмма из исследования Министерства транспорта штата Невада, показывающая среднеквадратичную ошибку в зависимости от количества использованных наземных контрольных точек. Вертикальная ось — логарифмическая.Подробнее по этой теме.Хотя размещение наземных контрольных точек может занять много времени, для повышения точности это занимает меньше времени, чем реферирование проекта. Мы рекомендуем использовать не менее пяти наземных контрольных точек.
Как выбрать место для размещения наземных опорных точек?
Если бы вы снимали идеальный квадрат, на этот вопрос было бы легко ответить: по одной наземной контрольной точке в каждом углу и по одной в центре.
Редко бывает так просто. Эти быстрые советы помогут вам разместить наземные контрольные точки для большей точности.
- Оставайся на низком уровне. Для получения стабильных результатов наземные контрольные точки должны находиться на земле.
- Будьте осторожны при выборе «естественных» наземных контрольных точек. Некоторые функции (например, парковочные места или угол здания) могут быть слишком повторяющимися, чтобы быть полезными. Тени заманчивы, но они могут двигаться даже за то время, которое требуется, чтобы облететь площадку.
- Если территория не идеально ровная, разместите опорные точки на разных высотах — например, на вершине и внизу холма.
- Внешние тесты показывают, что обычно нет необходимости размещать десятки наземных контрольных точек: стремитесь к от 5 до 10.
Наземные контрольные точки, нарисованные вручную: жертвуя точностью ради скорости
Картографы в спешке иногда наносят крестик на земле с краской, чтобы использовать в качестве опорных точек. До сих пор не решено, лучше ли это, чем ничего.
До сих пор не решено, лучше ли это, чем ничего.
Представьте себе полоску аэрозольной краски: она может покрыть площадь ладони. Маленький по сравнению со зданием, но нечеткий «центр» по сравнению с традиционными опорными точками.
Найдите разницу: два разных способа маркировки опорных точек
Где находится центр каждого из изображений выше? Это легко определить центр печатной GCP справа. На баллончике, нарисованном X слева, «центр» может быть где угодно в пределах 10 см: этого достаточно, чтобы испортить ваши результаты.
Мы всегда рекомендуем использовать опорные точки в шахматном порядке вместо окрашенных распылением. Если вам необходимо использовать аэрозольную краску, нарисуйте букву L, а не X, и укажите угол, а не центр.
Добавление опорных точек в проект Pix4D
Вы разместили опорные точки в поле, точно отметили их и провели опрос — что делать дальше?
Документация Pix4D содержит подробную и актуальную информацию о том, как включить опорные точки в ваш проект.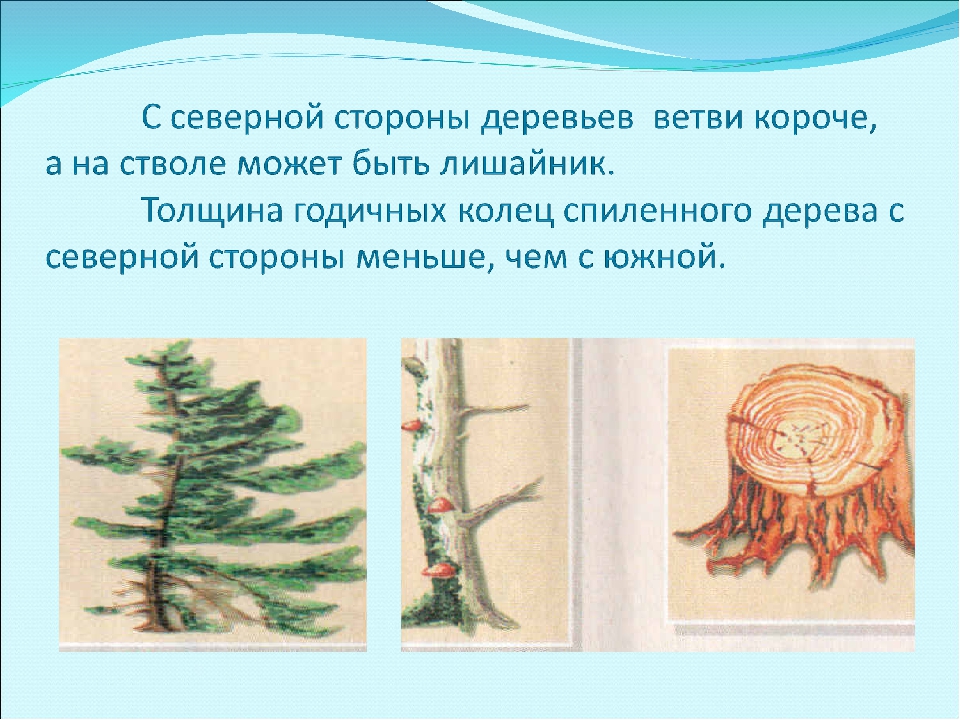
Всегда ли мне нужно использовать наземные контрольные точки?
Это зависит.
Опорные точки были традиционной частью проектов аэрофотосъемки. Однако это меняется.
Если вы используете дрон RTK, то наши тесты показали, что наземные контрольные точки существенно не повышают точность.
Если ваш дрон не поддерживает RTK, мы всегда рекомендуем использовать опорные точки.
Пропуск наземных контрольных точек может дать прекрасные результаты, но ваша реконструкция может не иметь правильного масштаба, ориентации или информации об абсолютном положении. Геотеги GCP или RTK могут помочь вам проверить точность реконструкции.
Будущее точности: AutoGCPs
Pix4Dengine — это мощная платформа, обеспечивающая масштабирование фотограмметрии. И у него только что было серьезное обновление.
AutoGCPs — это новый модуль, который в настоящее время является эксклюзивным для Pix4Dengine. Как следует из названия, они могут автоматически обнаруживать опорные точки в вашем проекте, быстрее выполняя ручную задачу. Сочетание машинного обучения и компьютерного зрения позволяет программному обеспечению почти мгновенно определять точный центр наземной контрольной точки.
Сочетание машинного обучения и компьютерного зрения позволяет программному обеспечению почти мгновенно определять точный центр наземной контрольной точки.
Внутренние тесты подтверждают, что с дронами с поддержкой RTK AutoGCP обеспечивает «точность лучше, чем пиксельная», — говорит руководитель проекта Андреа Дотти. «Когда люди проводят измерения вручную, результаты столь же точны, как и есть.”
В настоящее время технология ограничена Pix4Dengine: свяжитесь с командой, чтобы попробовать ее на себе.
Точность превыше всего
Как известно профессионалам (и энтузиастам) в области геодезии и картографии, точность является ключом к успеху практически любого проекта.
Использование дрона для аэрофотосъемки может дать впечатляющие изображения, но аэрофотограмметрия требует точности и аккуратности.
Существует ряд инструментов, которые можно использовать для достижения этой цели, которые мы продолжим описывать в этой серии публикаций.GCP — лишь одна из них.
Начать картографирование
Точные результаты, только по изображениям
| Изображение предоставлено All Drone Solutions |
Системы пассивного дневного освещения могут изменить архитектуру Мыслительное лидерство
Естественный свет — мощный архитектурный инструмент. По мере того, как важность экологичного дизайна растет, пассивные стратегии, такие как дневное освещение, стали критически важными для уменьшения воздействия застроенной среды.Кроме того, исследования последнего десятилетия показали, что дневной свет имеет значительные преимущества для здоровья и хорошего самочувствия пользователей.
Сегодня у нас больше, чем когда-либо, инструментов для использования дневного света. От инновационных светоотражающих материалов до продвинутого компьютерного моделирования — архитекторы используют современные технологии для более эффективного освещения зданий. Приняв эти системы, вы создадите более светлое будущее.
Приняв эти системы, вы создадите более светлое будущее.
Стратегии пассивного дневного освещения способствуют количеству и равномерному распределению дневного света по всему зданию, собирая естественный свет и отражая его в более темные области здания.Что делает эту стратегию «пассивной», так это то, что элементы конструкции не требуют специального механического оборудования или источников энергии. Как только солнце встает, пассивные стратегии дневного света собирают и отражают свет по всему зданию.
Архитекторы используют окна, световые люки, прозрачные двери, световые трубки, зеркала, световые полки и другие отражающие поверхности для сбора и направления света в ключевые области комнаты. Например, если зона ожидания расположена в темном углу без окон поблизости, архитекторы могут перенаправить свет из других хорошо освещенных частей комнаты, используя пассивные отражающие элементы.
Этот тип системы невероятно выгоден как для владельцев зданий, так и для посетителей.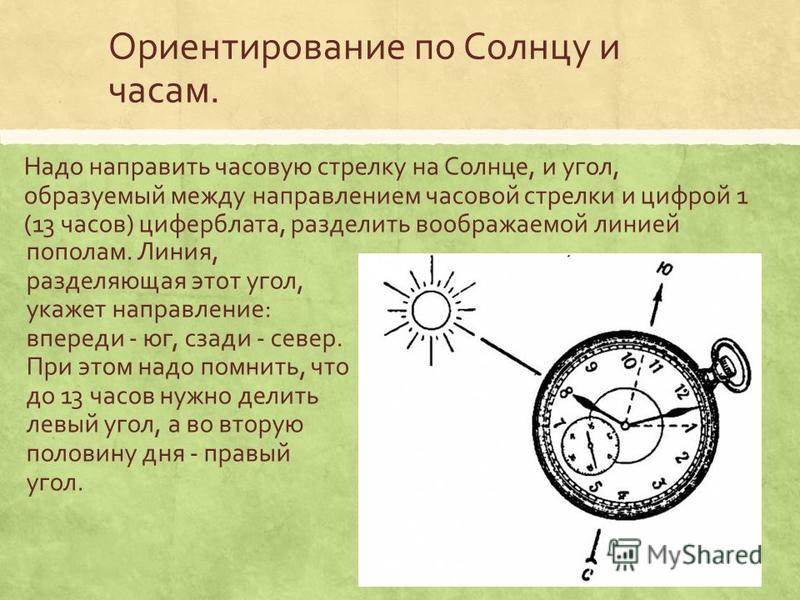 Вы будете тратить меньше энергии на поддержание освещения в здании в течение дня. Это, в свою очередь, может сэкономить ваши деньги и помочь достичь целей в области устойчивого развития и возобновляемости.
Вы будете тратить меньше энергии на поддержание освещения в здании в течение дня. Это, в свою очередь, может сэкономить ваши деньги и помочь достичь целей в области устойчивого развития и возобновляемости.
Есть также ряд преимуществ для здоровья и хорошего самочувствия, если в здание проникает больше естественного света. Улучшается воздействие естественного света:
Стратегии пассивного дневного светаПланируете ли вы больницу, школу, общественный центр или любое другое здание, эффективное пассивное дневное освещение сделает ваше пространство более уютным.Однако, чтобы воспользоваться всеми этими преимуществами, ваши стратегии дневного света должны работать в вашем конкретном месте и соответствовать вашим уникальным потребностям. Архитекторы добиваются этого, тщательно продумывая ориентацию здания и добавляя продуманные детали пассивного освещения в каждую комнату.
Каждое здание индивидуально, поэтому архитекторы настраивают стратегии пассивного дневного освещения в зависимости от местоположения здания и его предполагаемого использования. Цель дневного освещения — собрать достаточно дневного света летом, чтобы выключить электрическое освещение, и собрать как можно больше света зимой, чтобы обогреть здание. Вот несколько элементов дизайна, которые используют архитекторы, чтобы максимально увеличить естественное освещение:
Цель дневного освещения — собрать достаточно дневного света летом, чтобы выключить электрическое освещение, и собрать как можно больше света зимой, чтобы обогреть здание. Вот несколько элементов дизайна, которые используют архитекторы, чтобы максимально увеличить естественное освещение:
- Ориентация на здание. Направление света важно. Свет, который исходит с юга, обычно лучше всего подходит для дневного света, поскольку солнечный свет постоянен в течение дня и года. Эта ориентация также может использоваться для получения солнечного тепла.Свет, который исходит с севера, является следующим лучшим, поскольку солнечный свет такой же постоянный, как и юг, только в меньшем количестве. По возможности следует избегать света, идущего с востока и запада. Солнечный свет в этой ориентации резкий, он появляется только в течение половины дня, а высота солнца меняется в течение года, что затрудняет управление солнечным светом. Архитекторы проектируют здания таким образом, чтобы комнаты, которым требуется больше всего дневного света (например, парадный вход), выходили на север или юг, а комнаты, которым требуется меньше дневного света (например, складские помещения), выходили на восток или запад.
- Окна. Чтобы обеспечить как можно больше света в здании, архитекторы используют окна с высокой высотой головы. Они также могут использовать одинаковые окна (горизонтальные ленточные окна) по всему фасаду, чтобы равномерно освещать пространство. HMC Architects использовали этот метод при разработке проекта Frontier. Мы также использовали двухстороннее размещение окон — окна обращены друг к другу с противоположных или смежных сторон — чтобы осветить вход со всех сторон.
- Мансардные окна. Мансардные окна позволяют дневному свету проникать сверху, что полезно в помещениях в центре здания, куда не проникает свет из окон. Как и в случае с окнами, равномерное расположение окон в крыше приводит к равномерному освещению. Архитекторы также могут разместить световые люки высоко над полом, чтобы свет рассеивался до того, как достигнет земли.
- Столешницы. Окна, расположенные высоко над уровнем глаз, или фонари могут освещать всю комнату. Архитекторы обычно комбинируют фонари со светоотражающим материалом крыши или краской.Свет проникает через люки и отражается от крыши, распространяя очень рассеянный свет по комнате внизу.
- Внешние системы затемнения. В определенное время дня при каждой ориентации свет будет слишком ярким и может вызвать сильные блики внутри здания. Чтобы предотвратить это, архитекторы проектируют индивидуальные внешние системы затенения для защиты окон и других прозрачных проемов. Эти системы обычно включают комбинацию горизонтальных и вертикальных элементов, но различаются в зависимости от географического положения, климата и ориентации здания.
- Световые полки. Светоотражающая горизонтальная полка, расположенная над окнами, уменьшает блики и направляет свет глубже в пространство.
- Солнечные трубки. Они направляют солнечный свет с крыши через узкое отверстие. Днем они выглядят как обычные потолочные светильники, но питаются от солнца, а не электричества. Они хорошо работают, когда размещаются непосредственно над столами, где людям нужно много света.
- Светлые тона стен. Светоотражающая краска помогает свету отражаться в комнате и делает ее ярче.
- Параметрическое моделирование, моделирование дневного света и искусственный интеллект (AI). Современные архитектурные фирмы используют параметрическое программное обеспечение для создания оптимизированных стратегий дневного освещения зданий. Программное обеспечение для моделирования дневного света анализирует геометрию здания и рассчитывает ожидаемые уровни дневного света во всем здании в любое время года. ИИ — новейшая разработка, и ее потенциал еще предстоит увидеть, но он способен синтезировать массивные наборы данных за секунды для автоматического создания решения, а затем извлекать уроки из решения для создания более эффективного решения.
 Архитекторы обычно комбинируют фонари со светоотражающим материалом крыши или краской.Свет проникает через люки и отражается от крыши, распространяя очень рассеянный свет по комнате внизу.
Архитекторы обычно комбинируют фонари со светоотражающим материалом крыши или краской.Свет проникает через люки и отражается от крыши, распространяя очень рассеянный свет по комнате внизу.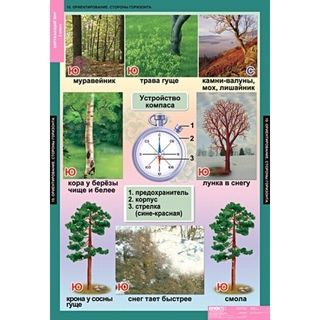 Они хорошо работают, когда размещаются непосредственно над столами, где людям нужно много света.
Они хорошо работают, когда размещаются непосредственно над столами, где людям нужно много света. Архитекторы часто используют комбинацию этих стратегий, чтобы максимально увеличить естественное освещение в пространстве. Например, когда HMC Architects спроектировали здание CSU Monterey Bay Joel and Dena Gambord Business and Information Technology Building, мы использовали три стратегии пассивного дневного света.
Например, когда HMC Architects спроектировали здание CSU Monterey Bay Joel and Dena Gambord Business and Information Technology Building, мы использовали три стратегии пассивного дневного света.
- В здании есть центральный атриум, соединяющий внутреннее и внешнее пространство. Мы обставили атриум большими окнами в крыше и потолочными окнами, чтобы впустить дневной свет. Мы также установили окна от пола до потолка во внутренних стенах.Свет проникает через световые люки и, в конечном итоге, отражается во внутренних окнах, освещая комнаты внутри.
- Увеличены окна на север и юг.
- Для ориентации на восток и запад мы создали индивидуальную систему внешнего затенения. Это предотвращает блики и нежелательное попадание солнечного тепла, позволяя при этом много рассеянного света проникать в пространство.
В результате здание светлое и хорошо вентилируется. Студенты могут расслабиться и насладиться видом на природу через множество окон и световых люков. Кроме того, здание потребляет меньше энергии и находится на пути к получению золотого сертификата LEED.
Кроме того, здание потребляет меньше энергии и находится на пути к получению золотого сертификата LEED.
Работая с архитекторами над оптимизацией дневного света, вы можете использовать силу естественного света и максимально использовать свои ресурсы.
Стоит ли включать в здание системы пассивного дневного освещения?Все пользователи получают выгоду, когда в здании используется естественное освещение. Это не только лучше для окружающей среды, но и для здоровья и благополучия.Однако проектирование для дневного света также может быть сложной задачей. Несколько факторов могут усложнить процесс проектирования.
Например, в многоэтажных многоквартирных домах или офисах сложно добиться максимального дневного освещения. Это потому, что многие из этих зданий очень глубокие, но не очень широкие. Труднее направить естественный свет в центр здания — пространство, наиболее удаленное от внешних окон.
Тем не менее, есть способы улучшить дневное освещение даже для таких зданий. Опытный архитектор точно знает, где разместить отражающие поверхности, чтобы направить больше света в пространство, чтобы вы могли максимально использовать то немногое естественного света, которое у вас есть.
Опытный архитектор точно знает, где разместить отражающие поверхности, чтобы направить больше света в пространство, чтобы вы могли максимально использовать то немногое естественного света, которое у вас есть.
Кроме того, хотя стратегии пассивного дневного освещения лучше всего использовать в начале проекта, можно модернизировать здание с некоторыми из этих элементов дизайна. Например, архитекторы могут добавить окна или системы витрин к внешней оболочке. Или они могут установить легкие полочки на имеющееся окно.Никогда не поздно добавить в ваше здание больше естественного света.
Пассивные системы дневного света и в будущем будут продолжать играть ключевую роль в архитектуре. Приняв естественный свет, вы будете способствовать более бережному отношению к окружающей среде и побудите посетителей вести более счастливую и здоровую жизнь.
Чтобы узнать больше о том, что системы пассивного дневного света могут сделать для вас, свяжитесь с HMC Architects сегодня.