Кинематическая цепь и механизм — Теория и решение задач
Кинематическая цепь
Кинематическая цепь – это сочетание звеньев, соединенных в кинематические пары. Имеется определенная классификация кинематических цепей – цепи могут быть простыми и сложными, замкнутыми (закрытыми) и разомкнутыми (открытыми), пространственными и плоскими.
Ранее считалось, что механизм может быть сформирован только на основе замкнутой цепи. Однако с развитием робототехники в качестве механизмов стали широко применяться разомкнутые (открытые) цепи. Поэтому данная классификация в некоторой степени утратила свое первоначальное значение.
Механизм
Механизмом называется кинематическая цепь, имеющая стойку (т.е. звено, принятое за неподвижное), в которой движение одного или нескольких звеньев полностью определяет характер движения остальных звеньев этой цепи.
Другими словами, — это кинематическая цепь, обладающая определенностью движения всех звеньев. Только одним звеньям дается принудительное движение (определенным образом задаются их законы движения, например, подсоединением к двигателю), а другие получают движение от этих звеньев.
Звенья, законы движения которых заданы, называются входными.
Звенья, законы которых надо определить, называются выходными. Количество входных звеньев определяется числом степеней свободы кинематической цепи, положенной в основу данного механизма.
Понятия входное и выходное (вход и выход) – это кинематическая характеристика. Не надо путать с понятиями – ведущее звено и ведомое звено. Ведущим звеном называется звено, к которому подводится мощность;
Таким образом, понятия ведущее и ведомое звено – это силовая (энергетическая) характеристика. Однако в подавляющем большинстве случаев входное звено одновременно является и ведущим, выходное звено – ведомым.
Основные виды механизмов >
Курсовой проект по ТММ >
Кинематические цепи. Степень подвижности механизмов
Содержание:
Кинематические цепи. Степень подвижности механизмов
- Кинематическая цепь. Степень мобильности механизма Как уже упоминалось, все звенья и кинематические пары упрощены на диаграмме при изучении движения механизма. На рисунке показано условное изображение наиболее часто используемых кинематических пар 5-го и 4-го классов. 1.3: a, b — подвижные 7, 2, неподвижная вращающаяся пара с 0 звеньями. wu g-прогрессивный; d-винт; электронное зубчатое колесо 4-го класса в точке зацепления А шестерен 1 и 2 Звенья связаны между собой кинематическими парами кинематических цепей.
Плоская цепочка образована плоскими звеньями. Точка звена в пространственной цепочке представляет путь пространства. Кинематические цепи можно разделить на простые и сложные. В простой цепочке каждое звено содержится не более чем в двух кинематических парах (рис.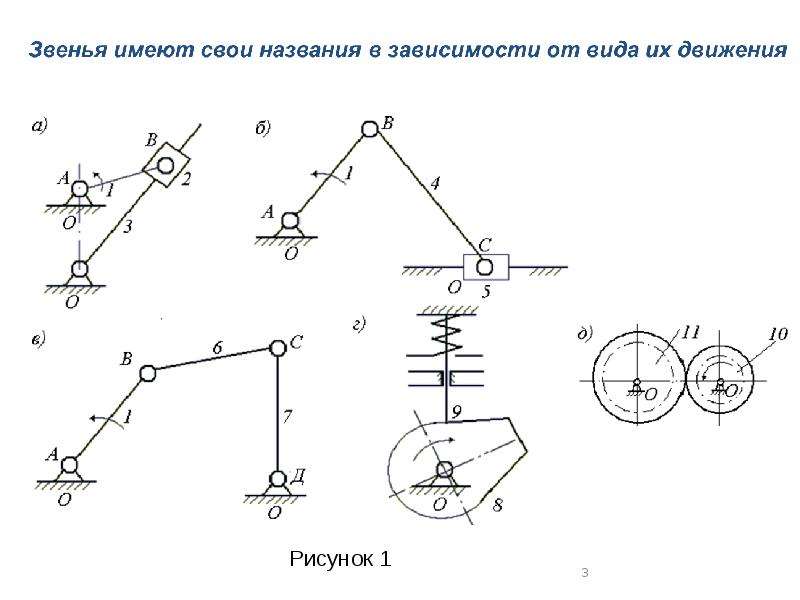 1.4, а). Различают открытые (открытые) цепи движения и закрытые цепи движения. Открытая кинематическая цепь имеет звенья, которые вписываются только в одну кинематическую пару (рис. 1.4, б). В замкнутом контуре все звенья включены как минимум в две кинематические пары.
1.4, а). Различают открытые (открытые) цепи движения и закрытые цепи движения. Открытая кинематическая цепь имеет звенья, которые вписываются только в одну кинематическую пару (рис. 1.4, б). В замкнутом контуре все звенья включены как минимум в две кинематические пары.
В зависимости от характера движения звена, существует плоская и пространственная кинематика Сеть. Людмила Фирмаль
Механизм всегда можно представить в виде кинематической цепи с одним фиксированным звеном (стойкой). Однако не все цепочки движений являются механизмами. Наиболее важной характеристикой любого механизма является его мобильность, которая, как известно, оценивается по степени мобильности (степени свободы) механизма. Это равно числу независимых движений, которые необходимо установить на верхнем (первом) звене механизма, чтобы получить четко определенное движение всех других подвижных звеньев. Степень мобильности механизма メ カ ニ ズ ム должна быть не менее 1 и равна числу обобщенных координат механизма.
В плоских механизмах ведущее звено обычно выполняет одно простое движение, вращение или перемещение, поэтому при таком механизме степень мобильности равна числу ведущих звеньев. Может быть одна или несколько первичных ссылок. Когда ведущее звено вращается вокруг фиксированной оси, его положение определяется обобщенными координатами (угол поворота звена). Когда предыдущая ссылка выполняет перевод, ее положение определяется линейными координатами движения ссылки.
- Степень мобильности механизма можно определить из структуры, которая связывает мобильность с количеством звеньев, количеством кинематических пар и классом. Настройте механизм с помощью k ссылок. Поскольку одно из звеньев (стойка) является фиксированным, количество подвижных звеньев в механизме составляет n = k -1. Рассмотрим пространственный механизм. Если звенья механизма не связаны в кинематической паре, общее число простых движений всех их подвижных звеньев равно VP.
 Включите в механизм следующее: Первая пара пикселей класса. /? 2 комплекта 2-го класса. /? Три пары в третьем классе.
Включите в механизм следующее: Первая пара пикселей класса. /? 2 комплекта 2-го класса. /? Три пары в третьем классе.
 Включите в механизм следующее: Первая пара пикселей класса. /? 2 комплекта 2-го класса. /? Три пары в третьем классе.
Включите в механизм следующее: Первая пара пикселей класса. /? 2 комплекта 2-го класса. /? Три пары в третьем классе.Пара 4-го класса и пара 5-го класса. Каждая пара во втором классе ограничивает движения двух самых простых движений и всех пар во втором классе -2p2. Аналогично, мы можем видеть, что кинематические пары 3, 4 и 5 классов исключают Zp> 4/4 и 5 пс соответственно из простейшего движения подвижной части механизма. число независимых возможных движений пространственного механизма, состоящего из n подвижных звеньев, W = bn- \ Px -2p2 -3 /> 3 -4 /> 4 -5p5. (1.1) Определяет степень подвижности (наиболее распространенного) планарного механизма.
Каждая кинематическая пара в первом классе ограничивает одно базовое движение, и все пары в первом классе делают движение Ipx невозможным. Людмила Фирмаль
В плоском движении мобильные соединения, которые не связаны кинематической парой, имеют 3n степеней свободы (мобильности). Каждая кинематическая пара в пятом классе занимает два простых движения от ссылки, и каждая кинематическая пара в четвертом классе берет один. Таким образом, кинематическая пара 5-го класса берет 2p5 из плоской кинематической цепи и 4 степени свободы в 4-м классе I />. Степень подвижности планарного механизма в этом случае определяется по формуле (1.2) W = 3p-2p5-P4.
Каждая кинематическая пара в пятом классе занимает два простых движения от ссылки, и каждая кинематическая пара в четвертом классе берет один. Таким образом, кинематическая пара 5-го класса берет 2p5 из плоской кинематической цепи и 4 степени свободы в 4-м классе I />. Степень подвижности планарного механизма в этом случае определяется по формуле (1.2) W = 3p-2p5-P4.
Зависимости по имени автора (1.1) и (1.2) называются выражениями Малышева и Чебышева соответственно. Они помогают оценить, можно ли использовать ту или иную цепь движения в качестве структурной схемы механизма, и количество ключевых звеньев в механизме. Таким образом, для схемы, показанной на рисунке, 1,5, a — c и подвижность равны 0,1 и 2 соответственно. 1,5 а, не может быть использован для конвертации Количество движений и основные звенья механизма, показанные на рисунке 1.5, b, c, должны быть равны 1 и 2 соответственно. A / 2 ■ 3 в г Рисунок 1.5 ■ 2 в б но
Наиболее распространенным является механизм с одной или двумя степенями подвижности. Существует механизм, при котором номер мобильности не соответствует условию (1.2). Общее количество наложенных ограничений может включать определенное количество повторных (ненужных) соединений, которые вводятся в механизм по разным причинам. Чтобы увеличить жесткость, шарнирный параллелограммный механизм W-1 (рис. 1.5, b) добавил дополнительную связь 4 к звену 2 и стойке (рис. 1.5, d). Эта связь и действительная кинематическая пара D и EV не изменили кинематику механизма, но «снизили» подвижность до нуля согласно уравнению (1.2).
Существует механизм, при котором номер мобильности не соответствует условию (1.2). Общее количество наложенных ограничений может включать определенное количество повторных (ненужных) соединений, которые вводятся в механизм по разным причинам. Чтобы увеличить жесткость, шарнирный параллелограммный механизм W-1 (рис. 1.5, b) добавил дополнительную связь 4 к звену 2 и стойке (рис. 1.5, d). Эта связь и действительная кинематическая пара D и EV не изменили кинематику механизма, но «снизили» подвижность до нуля согласно уравнению (1.2).
Связи, которые не влияют на кинематику механизма, но формально снижают степень его подвижности, называются пассивными. Некоторые механизмы имеют звенья, в которых относительное движение не влияет на кинематику механизма. Такой механизм имеет «лишние» степени свободы. Например, вращение круглого ролика на конце ведомой тяги кулачкового механизма не влияет на движение кулачка или движение этой тяги, но формально создает дополнительные степени свободы.
Смотрите также:
Предмет прикладная механика
Кинематические пары, кинематическая схема производственных машин
Для рассмотрения процесса передачи механической энергии внутри машины взаимодействующие детали и сборочные единицы принято рассматривать парами.
Кинематической парой называют подвижное соединение двух соприкасающихся звеньев. Свойства пары зависят от формы тех поверхностей, которыми звенья соприкасаются при своем возможном относительном движении. Пара, в которой отсутствует относительное движение между соприкасающимися звеньями, называется соединением. Звенья могут состоять из отдельных деталей или нескольких деталей, неподвижно скрепленных друг с другом.
В кинематических парах следует различать ведущие и ведомые звенья. Звено, задающее движение в кинематической паре, называют ведущим, а звено, получающее, движение,- ведомым или иногда рабочим.
Система подвижно соединенных звеньев представляет собой кинематическую цепь. Если кинематическая цепь предназначена для получения вполне определенных движений ведомых звеньев, ее называют механизмом. Для графического изображения кинематических пар применяют условные обозначения (табл. 1).
Если кинематическая цепь предназначена для получения вполне определенных движений ведомых звеньев, ее называют механизмом. Для графического изображения кинематических пар применяют условные обозначения (табл. 1).
Кинематические цепи, вычерченные с использованием условных обозначений кинематических пар, называют кинематическими схемами. Кинематические схемы представляют собой систему последовательно расположенных взаимодействующих звеньев, связывающих рабочие звенья с источником движения (рис. 1).
Рис 1. Упрощенная кинематическая схема токарно-винторезного станка
На рис. 1 приведена упрощенная кинематическая схема нарезания резьбы на токарно-винторезном станке. Главное движение (вращение шпинделя с заготовкой 1) осуществляется от электродвигателя М через ременную передачу со шкивами d1 и d2, зубчатые колеса z1 и z2, сменные зубчатые колеса а’ и б’, зубчатые колеса z3 и z4. Продольное перемещение резца (движение подачи) производится передачей вращения от шпинделя через зубчатые колеса z5 и z6, винтовые конические колеса z7 и z8, z9 и z10; сменные зубчатые колеса а и в, с и d к ходовому винту 3. Вращательное движение ходового винта преобразуется в поступательное перемещение суппорта 2 с резцом.
Вращательное движение ходового винта преобразуется в поступательное перемещение суппорта 2 с резцом.
Таблица 1. Условные обозначения кинематических пар механических передач
Просмотров: 246
Кинематическая цепь станка по металлу
Рис. 1. Условные обозначения кинематической цепи станка:
1 — Вал;
Соединение двух валов:
2 — глухое;
3 — глухое с предохранением от перегрузок;
4 — эластичное;
5 — шарнирное;
6 — телескопическое;
7 — плавающая муфта;
8 — зубчатая муфта.
Соединение детали с валом:
9 — свободное для вращения:
10 — подвижное без вращения;
11 — при помощи вытяжной шпонки
12 — глухое.
Подшипники скольжения:
13 — радиальный;
14 — радиально — упорный односторонний;
15 — радиально — упорный двусторонний.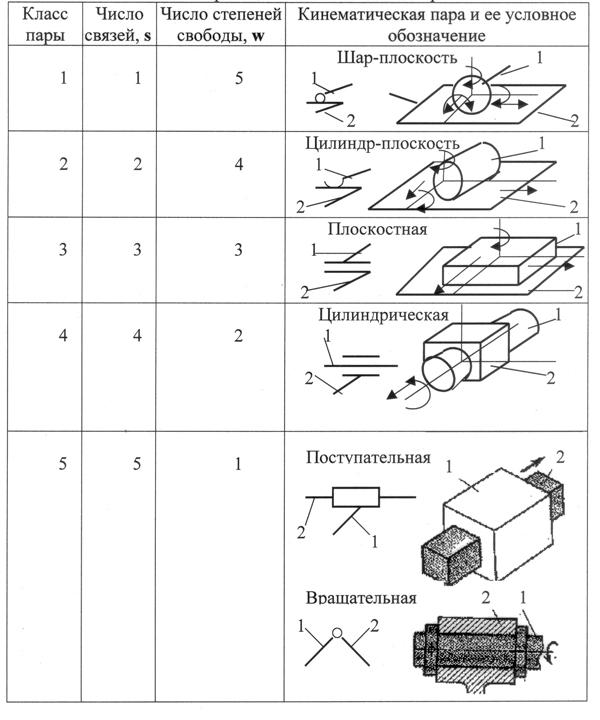
Подшипники качения:
16 — радиальный;
17 — радиально — упорный односторонний;
18 — радиально — упорный двусторонний.
Ременная передача:
19 — плоским ремнем;
20 — плоским ремнем перекрестная;
21 — клиновидным ремнем.
22 — Передача цепью.
Передачи зубчатые:
23 — цилиндрическими колесами;
24 — коническими колесами;
25 — винтовые.
26 — Передача червячная.
27 — Передача зубчатая реечная.
Передача ходовым винтом с гайкой:
28 — неразъемной;
29 — разъемной.
Муфты:
30 — кулачковая односторонняя;
31 — кулачковая двусторонняя;
32 — конусная;
33 — дисковая односторонняя;
34 — дисковая двусторонняя;
35 — обгонная односторонняя;
36 — обгонная двусторонняя.
Тормоза:
37 — конусный;
38 — колодочный;
39 — ленточный
40 — дисковый.
Концы шпинделей станков:
41 — центровых;
42 — патронных;
43 — прутковых;
44 — сверлильных;
45 — расточных с планшайбой;
46 — фрезерных;
47 — шлифовальных.
Электродвигатели
48 — на лапках;
49 — фланцевые;
50 — выстроенные.
Основные понятия и определения
Основные понятия и определенияВек, в котором мы живем, называют по-разному: и веком космоса, и автоматики, и атомным веком, и веком электроники, но как бы его не называли, основой технического прогресса была и остается машина.
Машина должна быть прочной, надежной в работе,
высокопроизводительной, но, вместе с тем, легкой, с минимальными
материалоемкостью и энергозатратами, не должна загрязнять окружающую среду,
должна соответствовать требованиям технической эстетики и эргономики.
Так что же такое машина?
Машина – механизм, предназначенный для выполнения полезной работы, служащий для облегчения умственного и физического труда человека. В зависимости от основного назначения машины подразделяют на энергетические, технологические и информационные.
Механизмом называется искусственное сочетание твердых тел, предназ-наченное для преобразования определенного движения одного или нескольких твердых тел в требуемые движения других твердых тел (механизм выпуска шасси, механизм управления закрылками).
Звено — твердое тело, входящее в состав механизма. Стойкой называют звено, принимаемое за неподвижное.
Звено, которому сообщается движение, преобразуемое в требуемые движения других тел, называют входным звеном.
Звено, совершающее движение, для выполнения
которого предназначен механизм, называют выходным звеном.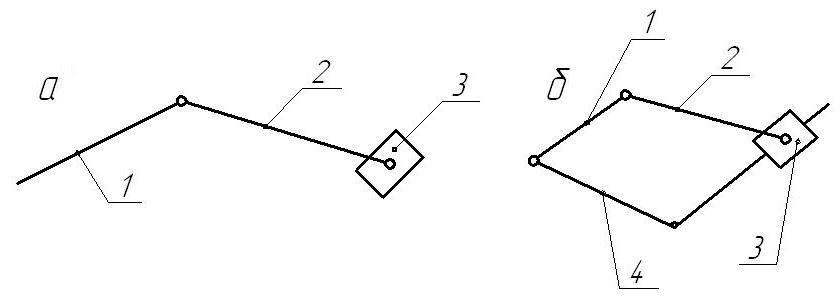
В зависимости от конструкции звено может быть простым, т.е. выполненным без сборочных операций, или составным. В таком случае простое звено и отдельные элементы сложного звена называют деталями.
Звенья различают по конструктивным признакам (зубчатое колесо, поршень, вал и т.д.), по деформативности (гибкое и жесткое звено), по характеру их движения: кривошип – звено, совершающее полнооборотное вращательное движение вокруг неподвижной оси;
коромысло – звено, совершающее вращательное движение на неполный оборот;
шатун – звено, совершающее плоское движение;
ползун – звено, совершающее возвратно-поступательное движение;
кулиса – подвижная направляющая;
камень – ползун, перемещающийся по кулисе.
Кинематическая пара
– подвижное соединение двух соприкасающихся звеньев, допускающих их
относительное движение.
Кинематическая пара, у которой соединение двух звеньев происходит по поверхности, называется низшей, в тех случаях, когда соединение двух звеньев происходит по линии или точке, такую кинематическую пару называют высшей.
Высшие кинематические пары имеют компактную конструкцию и меньшие потери на трение, чем низшие пары. Но низшие пары более износостойкие, обладают большей нагрузочной способностью.
По предложению акад. И.И. Артоболевского кинематические пары делят на классы.
Для свободного тела в пространстве число степеней подвижности равно шести, тогда H = 6 – S, где S – число наложенных условий связи, изменяющееся от 1 до 5. При S = 6 кинематическая пара становится жестким звеном, а при S = 0 кинематической пары не существует.
При
S
= 1 кинематические пары имеют пять степеней подвижности и относятся к первому
классу, при S=
2 – четыре степени подвижности и относятся ко второму классу. Наибольшее
распространение получили кинематические пары 5 класса (одноподвижные). К ним
относятся поступательная, вращательная и винтовая пары.
Наибольшее
распространение получили кинематические пары 5 класса (одноподвижные). К ним
относятся поступательная, вращательная и винтовая пары.
Классификация кинематических пар
|
Кинематическая пара и её условное обозначение |
Шар-плоскость
|
Цилиндр-плоскость
|
Сферическая
|
Цилиндрическая
|
Поступательная
|
|
Плоскостная
|
Сферическая
|
Вращательная
|
|||
|
Винтовая
|
|||||
|
|
5/1 |
4/2 |
3/3 |
2/4 |
1/5 |
|
Число степеней свободы / класс пары |
|||||
Кинематические
цепи.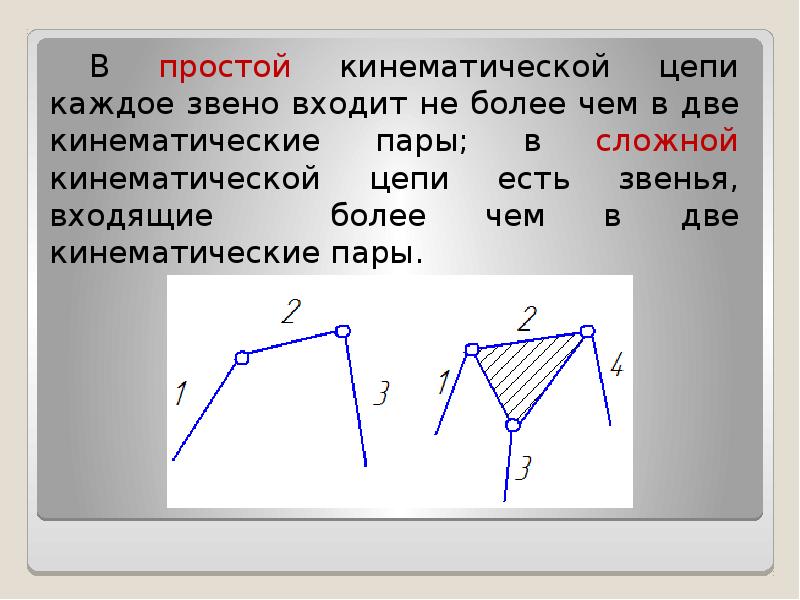 Систему звеньев,
связанных
между собой
кинематическими
парами,
называют кинематической
цепью.
Если звенья
совершают
движение в
одной
плоскости, кинематическая
цепь
будет плоской,
в
противном случае –
пространственной.
Систему звеньев,
связанных
между собой
кинематическими
парами,
называют кинематической
цепью.
Если звенья
совершают
движение в
одной
плоскости, кинематическая
цепь
будет плоской,
в
противном случае –
пространственной.
В зависимости от строения кинематическая цепь может быть замкнутой и разомкнутой, простой и сложной. В замкнутой кинематической цепи (рис.3.1а, в) каждое звено входит не менее чем в две кинематические пары, в разомкнутой цепи (рис. 3.1б, г) имеются звенья, входящие лишь в одну кинематическую пару.
Простой (рис. 3.1а, б) называют кинематическую цепь, у которой каждое звено входит в соединение с другим звеном с помощью одной или двух кинематических пар. В противном случае цепь называют сложной (рис.3.1 в, г).
Рис. 3.1
Кинематические цепи и их классификация — Студопедия
Определения: машина, механизм, звено механизма, виды звеньев
Машинойназывается искусственные устройства, выполняющие механические движения для преобразования энергии, материалов и информации.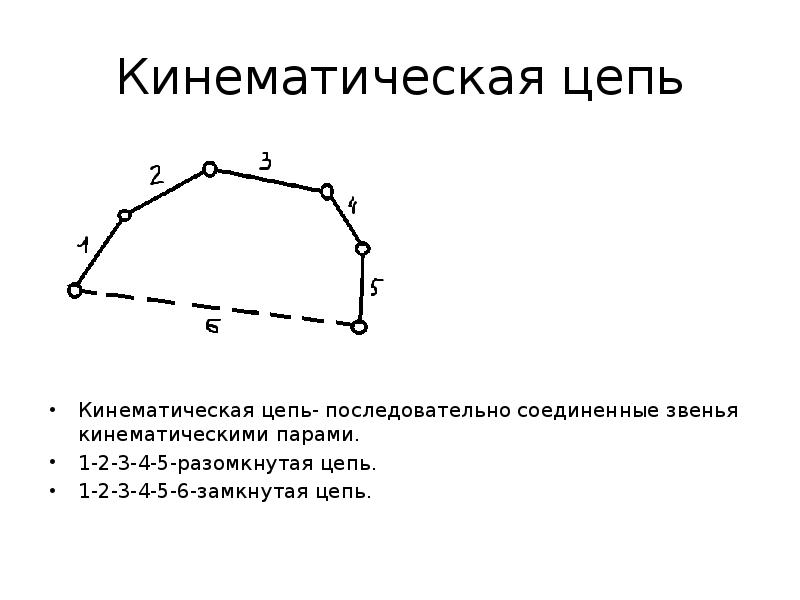 Основной признак машин – совершение некоторой полезной работы. Механизмом называют искусственно созданную систему тел, предназначенную для преобразования механического движения одного или нескольких требуемых движений других тел. Звеньями называют твёрдые тела, входящие в состав механизма и обладающие относительной подвижностью. Звенья могут состоять из одной или несколько жёстко связанных между собой частей, называемых деталями.
Основной признак машин – совершение некоторой полезной работы. Механизмом называют искусственно созданную систему тел, предназначенную для преобразования механического движения одного или нескольких требуемых движений других тел. Звеньями называют твёрдые тела, входящие в состав механизма и обладающие относительной подвижностью. Звенья могут состоять из одной или несколько жёстко связанных между собой частей, называемых деталями.
Классификация звеньев:
Стойка – неподвижное звено механизма (обозначают нулевой позицией)
Кривошип – звено, совершающее вращательное движение вокруг неподвижной оси.
Коромысло – звено, совершающее угловые качательные движения вокруг неподвижной оси.
Ползун – звено, совершающее линейные возвратно-поступательные движения.
Шатун – звено, совершающее плоскопараллельное движение.
Кулиса – звено, являющееся подвижно направляющее для ползуна (шатуна).
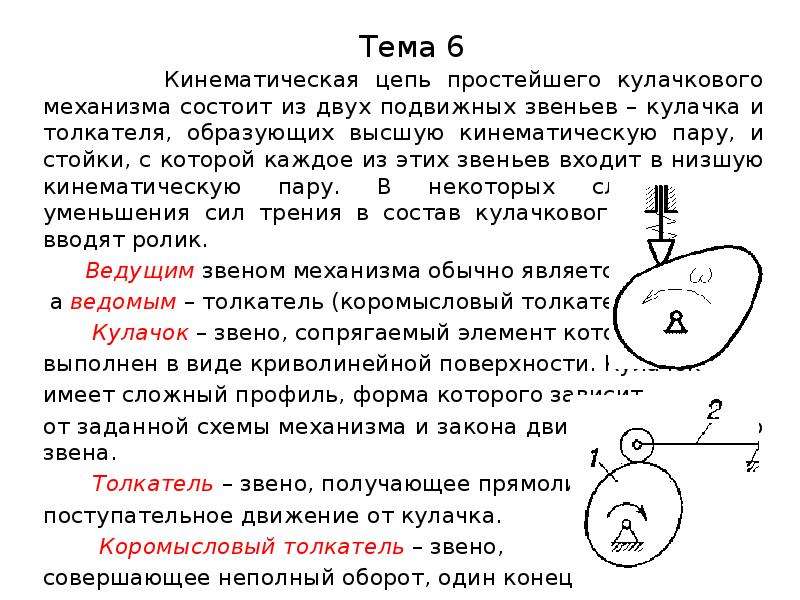
Кулачок – звено, кривизна профиля которого определяет закон движения связанного с ним звена, толкателя.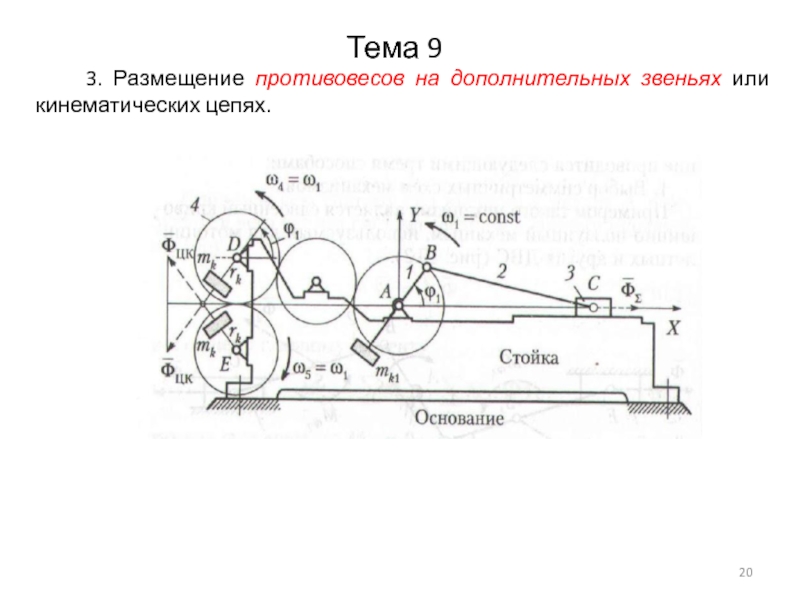
Зубчатое колесо
Кинематические пары и их классификация
Кинематической парой называются подвижные соединения двух соприкасающихся звеньев.
Любая кинематическая пара ограничивает взаимное движение звеньев, т.е. исключает одну или несколько степеней свободы.
Классификация кинематических пар:
По характеру относительного движения:
плоские – движение в одной плоскости
пространственные – движения в разных плоскостях
По характеру соприкосновения:
высшие – соприкосновение звеньев происходит по линии или точке (рельс)
низшие – соприкосновение звеньев происходит по поверхности (ползун)
По количеству условий связей, налагаемых кинематической парой на относительное движение звеньев.
Ограничение, налагаемое на движение звеньев, называется связями.
Классом кинематической пары называется число S условий связи, налагаемых кинематической парой на относительное движение звеньев.
S – число условий связи
H – число степеней свободы
Кинематические цепи и их классификация
Кинематическая цепь – связанная система звеньев, образующих между собой кинематические пары.
Классификация кинематических цепей:
Плоские – при закреплении одного звена, остальные звенья совершают плоское движение, параллельно некоторой неподвижной плоскости.
Пространственные – при закрепление одного звена, остальные звенья совершают движение в различных плоскостях.
Простые – в каждое звено входит не более, чем две кинематические пары.
Сложные – хотя бы одно звено имеет более двух кинематических пар.
Замкнутые – входит не более чем две кинематические пары, и эти звенья образуют один или несколько замкнутых контуров
Разомкнутые – звенья не образуют замкнутый контур.
Кинематические цепи — Большая Энциклопедия Нефти и Газа, статья, страница 1
Кинематические цепи
Cтраница 1
Кинематические цепи делятся на простые и сложные. Простой кинематической цепью называется такая цепь, у которой каждое звено входит не более чем в две кинематические пары.
[2]
Простой кинематической цепью называется такая цепь, у которой каждое звено входит не более чем в две кинематические пары.
[2]
Кинематические цепи подразделяются на плоские и пространственные в зависимости от вида движения звеньев: в одной или нескольких параллельных плоскостях и в пространстве. [3]
Кинематические цепи могут быть замкнутыми или незамкнутыми. Незамкнутой кинематической цепью называют такую цепь, в которой есть звенья, входящие в одну кинематическую пару. [4]
Кинематические цепи могут быть простыми и сложными, открытыми и замкнутыми, плоскими и пространственными. [6]
Кинематические цепи с вращательными и поступательными парами могут быть получены из данной, если положить параметр винта р О в случае вращательных и р оо в случае поступательных пар. [7]
[7]
Кинематические цепи подразделяют на открытые и замкнутые, плоские и пространственные. Такие кинематические цепи применяют в механизмах роботов, приборов и землеройных машин. [8]
Кинематические цепи и направляющие механизмов корректировочных перемещений должны состоять из минимального числа элементов, не иметь зазоров и обеспечивать наименьшее различие сопротивления перемещению при движении и при тро-гании с места. [9]
Кинематические цепи делятся на закрытые и открытые. Закрытой называется такая цепь, в которой каждое звено входит с остальными звеньями не менее чем в две кинематические пары. [11]
Кинематические цепи бывают разомкнутые и замкнутые. В замкнутой кинематической цепи ( рис.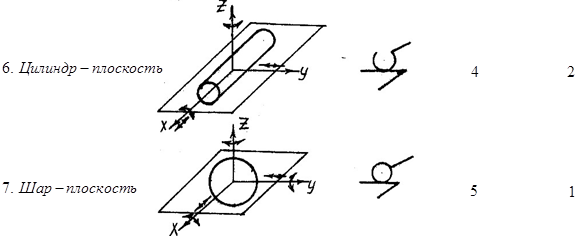 62, б) все звенья соединяются между собой и образуют замкнутый контур.
[13]
62, б) все звенья соединяются между собой и образуют замкнутый контур.
[13]
Кинематические цепи, осуществляющие функционально связанные перемещения рабочих органов станков, в большинстве случаев состоят из зубчатых колес. Последними звеньями этих цепей являются либо винт с гайкой, либо червячная передача. Поэтому при рассмотрении вопросов кинематической точности мы ограничимся только цепями этого вида, хотя в отдельных случаях в станках встречаются кинематические цепи для осуществления функционально связанных перемещений, имеющие в своем роставе и другие механизмы. [14]
Страницы: 1 2 3 4 5
Глава 3. Подробнее о машинах и механизмах
И Чжанс
Сьюзан Фингер
Стефани Беренс
Содержание
3.
 1 Плоские и пространственные механизмы
1 Плоские и пространственные механизмыМеханизмы можно разделить на плоские механизмы и пространственные механизмы , в соответствии с относительным движением твердые тела. В плоских механизмах все относительные движения твердых тел в одной плоскости или параллельно самолеты.Если есть какое-либо относительное движение, которое не находится в одной плоскости или в параллельных плоскостях механизм называется пространственный механизм . Другими словами, планарные механизмы являются по существу двумерные, в то время как пространственные механизмы трех размерный. В этом руководстве рассматриваются только плоские механизмы.
3.2 Кинематика и динамика механизмов
Кинематика механизмов связана с движением
детали без учета влияющих факторов (силы
и масса) влияют на движение.Таким образом, кинематика имеет дело с
фундаментальные концепции пространства и времени, а также величины скорости и
ускорение, полученное оттуда.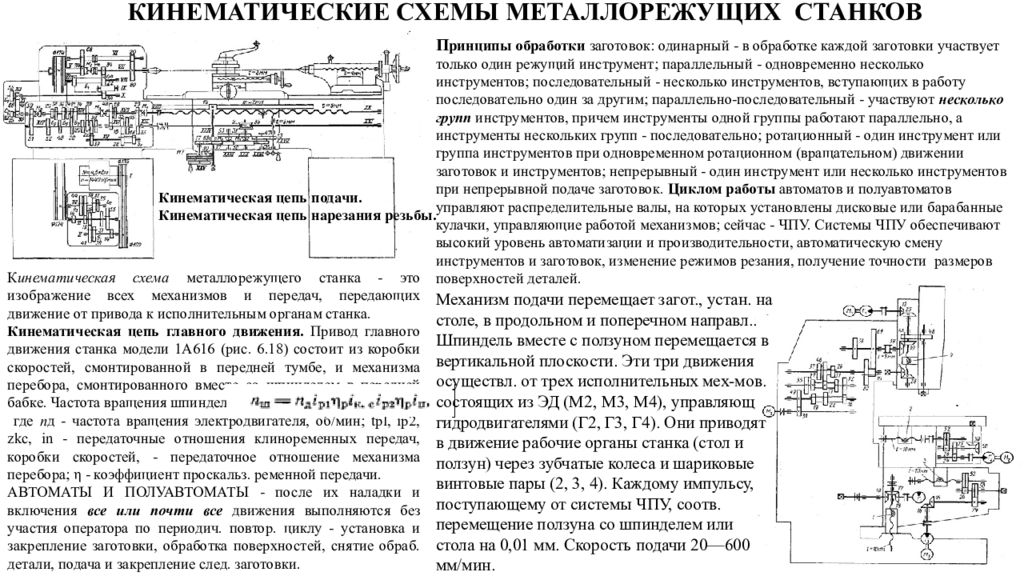
Кинетика занимается действием сил на тела. Это где вступают в игру эффекты гравитации.
Dynamics — это комбинация кинематики и кинетика .
Динамика механизмов касается сил, действующих на части — как уравновешенные, так и неуравновешенные силы с учетом массы и ускорения деталей, а также внешние силы.
3.3 Звенья, рамы и кинематические цепи
Звено определяется как твердое тело, имеющее два или более парные элементы, которые соединяют его с другими телами с целью передающая сила или движение (Ham et al. 58).
В каждой машине хотя бы одно звено занимает фиксированное положение. относительно земли или несет машину в целом вместе с ней во время движения. Эта ссылка представляет собой раму машины и называется фиксированной ссылкой .
Комбинация ссылок и пар без фиксированной ссылки не является
механизм, но кинематическая цепь .
3.4 Очертание скелета
Рисунок 3-1 Контур скелета
Для кинематического анализа механизм может быть представлен в сокращенной или скелетной форме, называемой скелетом наброски механизма. Очертание скелета дает все геометрическая информация, необходимая для определения относительных движений ссылок.На рис. 3-1 контур скелета нарисован для двигатель, показанный на Рисунке 2-1. Этот скелет содержит всю необходимую информацию для определения относительных движений основных звеньев, а именно длины AB кривошипа; длина до н.э. шатуна; А расположение оси коренного подшипника; и путь AC точки C, который представляет ось пальца запястья.
3,5 Пары, старшие пары, младшие пары и связи
Пара представляет собой соединение между поверхностями двух жестких
тела, которые удерживают их в контакте и относительно подвижны.Для
Например, на рис. 3-2 дверь, соединенная с
рама с петлями составляет шарнир поворотный ( штифт
шарнир ), позволяющий поворачивать дверь вокруг своей оси. Фигура
3-2b и c показаны скелеты поворотного сустава. Рисунок 3-2b используется
когда оба звена, соединенные парой, могут поворачиваться. Рисунок 3-2c используется, когда
одно из звеньев, соединенных парой, является рамой.
Фигура
3-2b и c показаны скелеты поворотного сустава. Рисунок 3-2b используется
когда оба звена, соединенные парой, могут поворачиваться. Рисунок 3-2c используется, когда
одно из звеньев, соединенных парой, является рамой.
Рисунок 3-2
Револьвентная параНа рисунке 3-3a створчатое окно можно переместить. относительно створки.Такое относительное движение называется призматическая пара . Очертания его скелета показаны на b , c и d . c и d используются, когда одна из ссылок — это рамка .
Рисунок 3-3
Призматическая пара Как правило, в механизмах есть два типа пар , нижние пары и верхние пары . Какие
отличает их тип контакта между двумя телами
пара.Пары поверхностного контакта называются нижними парами .
В планарных (2D) механизмах есть два
подкатегории нижних пар — поворотные пары и призматические
пары , как показано на рисунках 3-2 и 3-3 соответственно. Пары точечного, линейного или криволинейного контакта называются выше.
пар . На рис. 3-4 показаны некоторые примеры пар старшего разряда .
Механизмы, состоящие из твердых тел и нижних пар, называются рычаги .
Пары точечного, линейного или криволинейного контакта называются выше.
пар . На рис. 3-4 показаны некоторые примеры пар старшего разряда .
Механизмы, состоящие из твердых тел и нижних пар, называются рычаги .
Рисунок 3-4 Высшие пары
3,6 Кинематический анализ и синтез
В кинематическом анализе конкретный данный механизм исследованы на основе геометрии механизма плюс другие известные характеристики (такие как входная угловая скорость, угловое ускорение, и др. ). Кинематический синтез , с другой стороны, процесс разработки механизма для достижения желаемого задача. Здесь как выбор типов, так и размеры новый механизм может быть частью кинематического синтеза.(Сандор и Эрдман, 84)
Содержание
Полное содержание- 1 Введение в механизмы
- 2 Механизмы и простые машины
- 3 Подробнее о машинах и механизмах
- 3.1 Плоские и пространственные механизмы
- 3.
2 Кинематика и динамика механизмов- 3.3 Звенья, рамки и кинематические цепи
- 3.4 Очертание скелета
- 3.5 Пары, старшие пары, младшие пары и связи
- 3.6 Кинематический анализ и синтез
- 3.
- 4 Базовая кинематика жестких тел с ограничениями
- 5 планарных рычагов
- 6 кулачков
- 7 передач
- 8 Прочие механизмы
- Индекс
- Ссылки
- 2 Механизмы и простые машины
 2 Кинематика и динамика механизмов
2 Кинематика и динамика механизмов
sfinger @ ri.cmu.edu
Разница между кинематической парой и кинематической цепью
Разница между кинематической парой и кинематической цепьюСравнение кинематической пары и кинематической цепи
Резюме: Основная разница между кинематической парой и кинематической цепью состоит в том, что в кинематической паре Два элемента соединены вместе.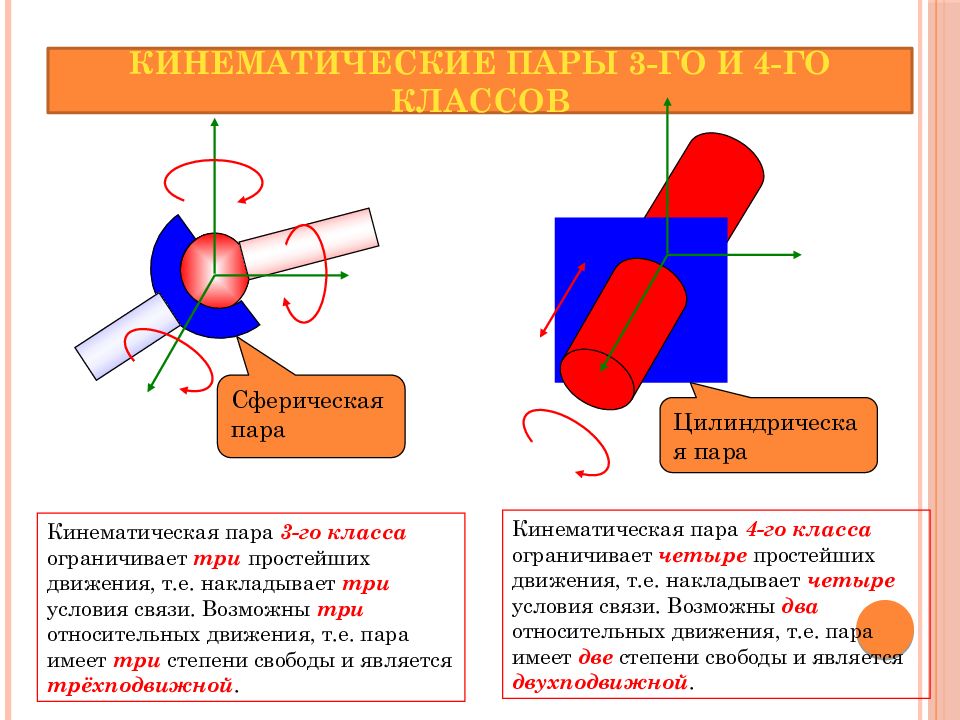 Тогда как в Kine matic Chain Четыре или более четырех элементов, соединенных вместе.
Тогда как в Kine matic Chain Четыре или более четырех элементов, соединенных вместе.
| Кинематическая пара | Кинематическая цепь |
|---|---|
| Два соединенных вместе элемента | Четыре или более четырех элементов, соединенных вместе |
| Имеют ограниченное относительное движение относительно друг друга | Движение любой точки на звене относительно любой другой точки следует в определенном направлении |
| Каждая пара имеет два звена | Цепь состоит как минимум из четырех звеньев.Первое и последнее звено соединены в замкнутую цепь |
| Кинематическая пара является частью цепи. | Кинематическая цепь не является частью кинематической пары. |
| Примеры : Цилиндр и поршень, кривошип и шатун, поршень и шатун | Примеры : цепь с четырьмя звеньями, цепь ползункового кривошипа и цепь с двойным кривошипом |
- Говорят, что два звена или элемента машины при контакте друг с другом образуют пару.
- Если относительное движение между ними полностью или успешно ограничено (то есть в определенном направлении), пара называется кинематической парой.

- Когда кинематические пары связаны таким образом, что последнее звено соединяется с первым звеном для передачи определенного движения (т.е. полностью или успешно ограниченного движения), это называется кинематической цепью .
- Другими словами, кинематическая цепь может быть определена как комбинация кинематических пар, соединенных таким образом, что каждое звено образует часть двух пар, а относительное движение между звеньями или элементами полностью или успешно ограничивается.
- Например, коленчатый вал двигателя образует кинематическую пару с подшипниками, которые закреплены в паре, шатун с кривошипом образует вторую кинематическую пару, поршень с шатуном образует третью пару, а поршень с подшипником цилиндр образует четвертую пару. Общая комбинация этих звеньев представляет собой кинематическую цепь.
 Общая комбинация этих звеньев представляет собой кинематическую цепь.
Общая комбинация этих звеньев представляет собой кинематическую цепь.Кинематическая цепь — обзор
1.3 Кинематические пары
Тяги являются основными элементами всех механизмов.Тяги состоят из звеньев и кинематических пар (шарниров). Связь , иногда известная как элемент или элемент , представляет собой (предполагаемое) твердое тело, которое имеет узлы. Узлы определяются как точки, в которые могут быть прикреплены ссылки. Ссылка, соединенная с соседними ссылками s узлами, представляет собой ссылку градусов s. Связь первой степени также называется унарной (рис. 1.3a), второй степени — двоичной (рис. 1.3b), третьей степени — троичной (рис. 1.3c) и т. Д.
Рисунок 1.3.
Первым шагом в анализе движения механизма является построение эквивалентной кинематической каркасной схемы или . Кинематическая диаграмма представляет собой стержневую диаграмму и отображает только основные части механизма.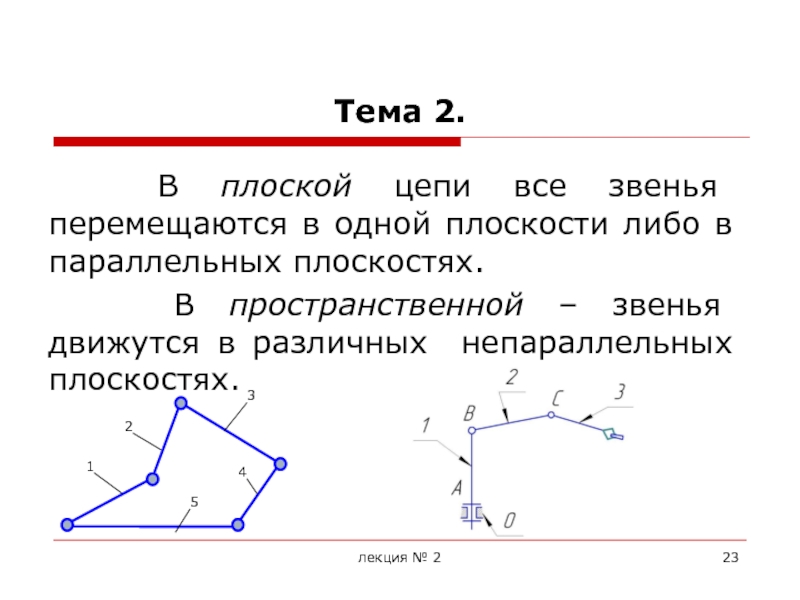 Звенья пронумерованы (начиная с наземного звена под номером 0), а кинематические пары обозначены буквами. Входная ссылка также помечена.
Звенья пронумерованы (начиная с наземного звена под номером 0), а кинематические пары обозначены буквами. Входная ссылка также помечена.
Кинематическая пара или шарнир — это соединение между двумя или более звеньями (в их узлах).Кинематическая пара допускает относительное движение между соединенными звеньями.
Количество независимых координат, которые однозначно определяют относительное положение двух ограниченных звеньев, называется степенью свободы данной кинематической пары. В качестве альтернативы вводится термин класс кинематической пары . Кинематическая пара относится к классу j , если она уменьшает относительное движение связанных тел на j степеней свободы; то есть j скалярных условий ограничения соответствуют данной кинематической паре.Следовательно, такая кинематическая пара имеет 6j независимых координат. Число степеней свободы — это фундаментальная характеристическая величина кинематических пар. Одно из звеньев системы обычно считается ссылочным звеном, и положение других RB определяется по отношению к этому ссылочному телу. Если опорная линия связи является стационарной, используется термин кадр или земля .
Одно из звеньев системы обычно считается ссылочным звеном, и положение других RB определяется по отношению к этому ссылочному телу. Если опорная линия связи является стационарной, используется термин кадр или земля .
Координаты в определении степени свободы могут быть линейными или угловыми.Также используемые координаты могут быть абсолютными (измеренными относительно кадра) или относительными. На рисунках 1.4–1.9 показаны примеры кинематических пар, обычно встречающихся в механизмах. На рисунках 1.4a и 1.4b показаны две формы плоской кинематической пары с одной степенью свободы, а именно кинематическая пара вращающегося пальца и кинематическая пара перемещающегося ползуна. Обе они обычно обозначаются как полные кинематические пары и относятся к пятому классу. Кинематическая пара штифтов допускает одну вращательную (R) степень свободы, а кинематическая пара ползуна допускает одну поступательную (T) степень свободы между соединенными звеньями.Оба они являются частными случаями другой общей кинематической пары с одной степенью свободы, винта и гайки (рис. 1.5a). Движение гайки или винта относительно другого приводит к спиральному движению. Если угол винтовой линии сделать нулевым (рис. 1.5b), гайка вращается без продвижения и становится кинематической парой штифта. Если угол винтовой линии равен 90 °, гайка будет перемещаться вдоль оси винта, и она станет кинематической парой ползуна.
1.5a). Движение гайки или винта относительно другого приводит к спиральному движению. Если угол винтовой линии сделать нулевым (рис. 1.5b), гайка вращается без продвижения и становится кинематической парой штифта. Если угол винтовой линии равен 90 °, гайка будет перемещаться вдоль оси винта, и она станет кинематической парой ползуна.
Рисунок 1.4.
Рисунок 1.5.
Рисунок 1.6.
Рисунок 1.7.
Рисунок 1.8.
Рисунок 1.9.
На рис. 1.6 показаны примеры кинематических пар с двумя степенями свободы, которые одновременно допускают два независимых относительных движения, а именно поступательное (T) и вращательное (R), между соединенными звеньями. Кинематическая пара с двумя степенями свободы обычно называется полукинематической парой и относится к 4-му классу. Полукинематическую пару иногда также называют кинематической парой качение-скольжение, поскольку она допускает как вращение (качение), так и поступательное движение (скольжение).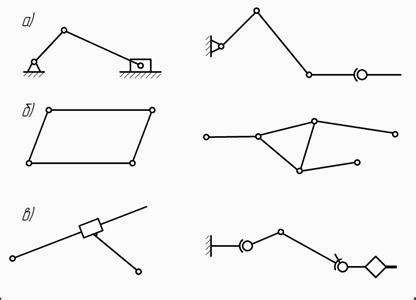
Джойстик, кинематическая пара шаровой головки или сферическая кинематическая пара (рис. 1.7a) является примером кинематической пары с тремя степенями свободы (третий класс), которая допускает три независимых угловых движения между двумя ссылки, к которым присоединяются. Эта кинематическая пара шаров обычно используется в трехмерном механизме, одним из примеров которых являются кинематические пары шаров, используемые в автомобильных системах подвески. Плоская кинематическая пара (рис. 1.7b) также является примером кинематической пары с тремя степенями свободы, которая допускает два перемещения и одно вращение.
Обратите внимание, что для визуализации степени свободы кинематической пары в механизме полезно «мысленно отсоединить» два звена, которые создают кинематическую пару, от остальной части механизма. Легче увидеть, сколько степеней свободы имеют два соединенных звена по отношению друг к другу.
На рисунке 1.8 показан пример кинематической пары второго класса (цилиндр на плоскости), а на рисунке 1. 9 представлена кинематическая пара первого класса (сфера на плоскости).
9 представлена кинематическая пара первого класса (сфера на плоскости).
Тип контакта между элементами может быть точечным (P), криволинейным (C) или поверхностным (S).Термин нижняя кинематическая пара был введен Рило для описания кинематических пар с поверхностным контактом. Он использовал термин высшая кинематическая пара для описания кинематических пар с точечным или криволинейным контактом. Основным практическим преимуществом пар с более низкой кинематикой перед парами с более высокой кинематикой является их лучшая способность удерживать смазку между их охватывающими поверхностями. Это особенно верно для кинематической пары вращающегося пальца.
Замкнутая кинематическая пара — это кинематическая пара, которая удерживается вместе или замыкается своей геометрией.Штифт в отверстии или ползун в двустороннем пазу — это форма замкнутой кинематической пары. Кинематическая пара , закрытая под действием силы , такая как штифт в полуподшипнике или ползун на поверхности, требует некоторой внешней силы, чтобы удерживать их вместе или закрывать.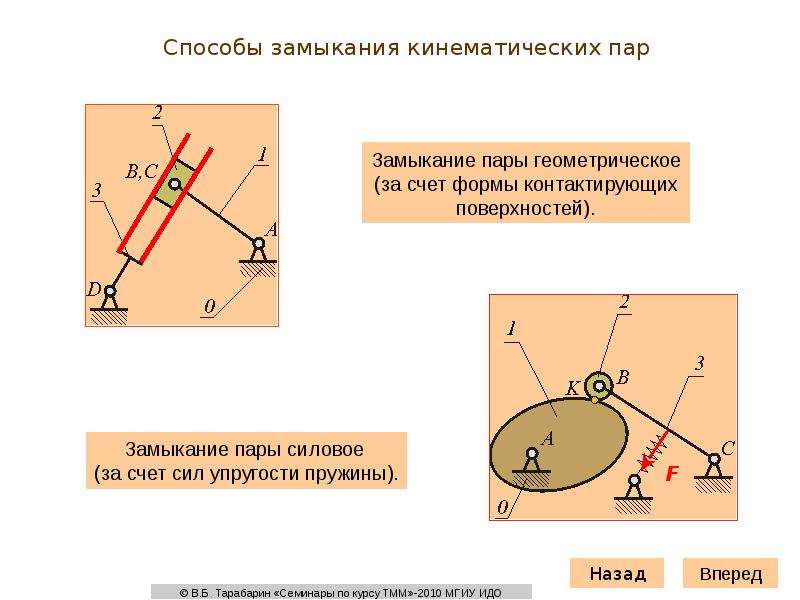 Эта сила может создаваться силой тяжести, пружиной или какими-либо внешними средствами. В соединениях обычно предпочтительны замкнутые кинематические пары, и их легко реализовать. Для систем кулачкового толкателя часто предпочтительнее принудительное закрытие.
Эта сила может создаваться силой тяжести, пружиной или какими-либо внешними средствами. В соединениях обычно предпочтительны замкнутые кинематические пары, и их легко реализовать. Для систем кулачкового толкателя часто предпочтительнее принудительное закрытие.
Порядок кинематической пары определяется как количество соединенных звеньев минус один.Простейшая кинематическая парная комбинация двух звеньев имеет порядок 1 и представляет собой единую кинематическую пару (рис. 1.10а). Поскольку дополнительные звенья размещаются в одной кинематической паре, порядок увеличивается по принципу один к одному (рис. 1.10b. Порядок кинематических пар имеет значение для правильного определения общих степеней свободы сборки.
Рисунок 1.10 Используется с разрешения Ссылка 15.
Тела, связанные кинематическими парами, образуют кинематическую цепь . Простые кинематические цепи показаны на рис.1.11.
Рисунок 1.11. Используется с разрешения Ref. 15.
Контур или петля представляет собой конфигурацию, описываемую многоугольником (рис. 1.11a).
1.11a).
Наличие петель в механической структуре может использоваться для определения следующих типов цепей:
- ▪
Замкнутые кинематические цепи имеют одну или несколько петель, так что каждое звено и каждая кинематическая пара содержится в хотя бы одну из петель (рис. 1.11а). Замкнутая кинематическая цепь не имеет открытой точки крепления.
- ▪
Открытые кинематические цепи не содержат петель (рис. 1.11b). Типичный пример открытой кинематической цепи — промышленный робот.
- ▪
Смешанные кинематические цепи представляют собой комбинацию закрытых и открытых кинематических цепей.
Также полезна другая классификация:
- ▪
Простые цепочки содержат только двоичные элементы.
- ▪
Сложные цепи содержат по крайней мере один элемент степени 3 или выше.
Механизм определяется как кинематическая цепь, в которой по крайней мере одно звено «заземлено» или прикреплено к раме (рис.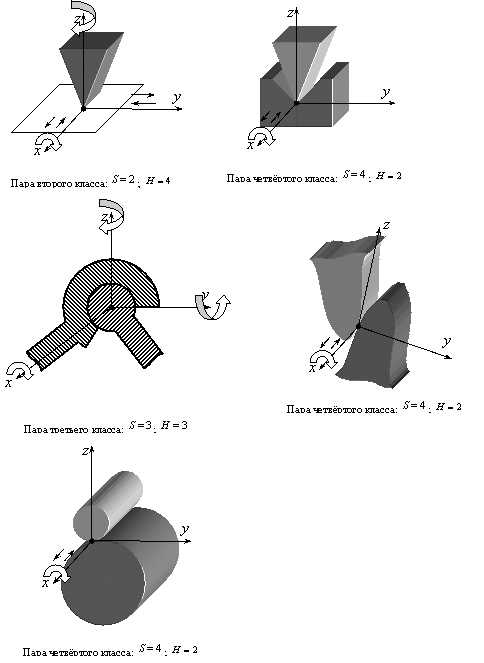 1.11a и 1.12). По определению Рило, машина представляет собой совокупность механизмов, предназначенных для передачи усилий и выполнения работы. Он рассматривал все устройства, передающие энергию или силу, как машины, которые используют механизмы в качестве строительных блоков для обеспечения необходимых ограничений движения.
1.11a и 1.12). По определению Рило, машина представляет собой совокупность механизмов, предназначенных для передачи усилий и выполнения работы. Он рассматривал все устройства, передающие энергию или силу, как машины, которые используют механизмы в качестве строительных блоков для обеспечения необходимых ограничений движения.
Рисунок 1.12. Используется с разрешения Ref.15.
Можно определить следующие термины (рис. 1.12):
- ▪
Кривошип — это звено, которое совершает полный оборот вокруг неподвижной заземленной оси.
- ▪
Коромысло — это звено, которое имеет колебательное (назад и вперед) вращение и прикреплено к заземленной оси.
- ▪
Муфта или шатун — это звено, которое имеет сложное движение и не прикреплено к земле.
Земля определяется как любая ссылка или ссылки, которые являются фиксированными (неподвижными) по отношению к опорному кадру. Обратите внимание, что опорный кадр может фактически находиться в движении.
Обратите внимание, что опорный кадр может фактически находиться в движении.
Кинематическая цепь — 3D анимация
В машиностроении кинематическая цепь представляет собой совокупность твердых тел, соединенных шарнирами для обеспечения ограниченного (или желаемого) движения, которое является математической моделью механической системы. [1] Как и в привычном использовании слова «цепочка», твердые тела или звенья ограничены своими связями с другими звеньями.Примером может служить простая открытая цепь, образованная последовательно соединенными звеньями, как обычная цепь, которая является кинематической моделью типичного робота-манипулятора. [2]
Математические модели соединений или шарниров между двумя звеньями называются кинематическими парами. Кинематические пары моделируют шарнирные и скользящие шарниры, фундаментальные для робототехники, часто называемые нижними парами , и поверхностные контактные соединения, важные для кулачков и зубчатой передачи, называемые верхними парами . Эти суставы обычно моделируются как голономные связи.Кинематическая диаграмма — это схема механической системы, которая показывает кинематическую цепь.
Эти суставы обычно моделируются как голономные связи.Кинематическая диаграмма — это схема механической системы, которая показывает кинематическую цепь.
Современное использование кинематических цепей включает податливость, которая возникает из-за изгиба соединений в прецизионных механизмах, податливость звеньев в податливых механизмах и микро-электромеханических системах, а также податливость кабеля в роботизированных кабельных системах и системах натяжения. [3] [4]
Формула мобильности
Степени свободы или подвижность , кинематической цепи — это количество параметров, которые определяют конфигурацию цепи. [2] [5] Система из n твердых тел, движущихся в пространстве, имеет 6n степеней свободы, измеренных относительно неподвижной рамы. Этот фрейм включается в подсчет тел, поэтому мобильность не зависит от связи, образующей фиксированный фрейм. Это означает, что степень свободы этой системы составляет M = 6 ( N — 1), где N = n + 1 — количество движущихся тел плюс неподвижное тело.
Соединения, соединяющие тела, накладывают ограничения.В частности, петли и ползунки накладывают пять ограничений и, следовательно, устраняют пять степеней свободы. Удобно определить количество ограничений c , которые налагает соединение, с точки зрения свободы соединения f , где c = 6 — f . В случае шарнира или каретки, которые являются шарнирами с одной степенью свободы, f = 1 и, следовательно, c = 6 — 1 = 5.
В результате подвижность кинематической цепи, образованной из n подвижных звеньев и j шарниров, каждое со свободой f i , i = 1,.{j} f_ {i}}
Напомним, что N включает фиксированную связь.
Анализ кинематических цепей
Уравнения связи кинематической цепи связывают диапазон перемещений, разрешенный в каждом сочленении, с размерами звеньев цепи и образуют алгебраические уравнения, которые решаются для определения конфигурации цепи, связанной с конкретными значениями входных параметров, называемых степени свободы.
Уравнения связей для кинематической цепи получены с использованием жестких преобразований [Z] для характеристики относительного перемещения, разрешенного в каждом соединении, и отдельных жестких преобразований [X] для определения размеров каждого звена.В случае последовательной открытой цепи результатом является последовательность жестких преобразований, чередующихся преобразований суставов и звеньев от основания цепи к ее концевому звену, которое приравнивается к заданному положению концевого звена. Цепь из n звеньев, соединенных последовательно, имеет кинематические уравнения:
- [T] = [Z1] [X1] [Z2] [X2] ⋯ [Xn − 1] [Zn], {\ displaystyle [T] = [Z_ {1}] [X_ {1}] [Z_ { 2}] [X_ {2}] \ cdots [X_ {n-1}] [Z_ {n}], \!}
где [ T ] — преобразование, определяющее конечную ссылку — обратите внимание, что Цепь включает «нулевое» звено, состоящее из каркаса заземления, к которому оно прикреплено.Эти уравнения называются уравнениями прямой кинематики последовательной цепи. [6]
Кинематические цепи широкого диапазона сложности анализируются путем приравнивания кинематических уравнений последовательных цепей, которые образуют петли внутри кинематической цепи. Эти уравнения часто называют петлевыми уравнениями .
Сложность (с точки зрения расчета прямой и обратной кинематики) цепи определяется следующими факторами:
Пояснение
Два или более твердых тела в пространстве вместе называются системой твердых тел.Мы можем препятствовать движению этих независимых твердых тел кинематическими ограничениями. Кинематические ограничения — это ограничения между твердыми телами, которые приводят к уменьшению степеней свободы системы твердых тел. [5]
Синтез кинематических цепей
Уравнения связи кинематической цепи можно использовать в обратном порядке для определения размеров звеньев из спецификации желаемого движения системы. Это называется кинематическим синтезом . [7]
Возможно, наиболее разработанная формулировка кинематического синтеза относится к четырехстержневым связям, что известно как теория Берместера. [8] [9] [10]
Фердинанда Фройденштейна часто называют отцом современной кинематики за его вклад в кинематический синтез связей, начатый в 1950-х годах. Его использование недавно разработанного компьютера для решения уравнения Фройденштейна стало прототипом систем автоматизированного проектирования. [7]
Эта работа была обобщена на синтез сферических и пространственных механизмов. [2]
См. Также
Страница не найдена | Институт науки и технологий Сатьябамы (считается университетом)
СостояниеВыберите StateAndaman и NicobarAndhra PradeshArunachal PradeshAssamBiharChandigarhChhattisgarhDadra И Нагар HaveliDaman И DiuDelhiGoaGujaratHaryanaHimachal PradeshJammu и KashmirJharkhandKarnatakaKeralaLakshadweepMadhya PradeshMaharashtraManipurMeghalayaMizoramNagalandOdishaPuducherryPunjabRajasthanSikkimTamil NaduTelanganaTripuraUttar PradeshUttarakhandWest Бенгальский
Курсы— Select -Undergraduate Courses (UG) Инженерные курсы (B.E. / B.Tech / B.Arch / B.Des) BE — компьютерные науки и инженерия со специализацией в области искусственного интеллекта B.E — компьютерные науки и инженерия со специализацией в области анализа данных B.E — компьютерные науки и инженерия со специализацией в Интернете ThingsB.E — Компьютерные науки и инженерия B.E — Электротехника и электроника B.E — Электроника и техника связи B.E — Электроника и приборостроение B.E — Машиностроение B.E — Автомобильная инженерия B.E — Мехатроника B.E — Авиационная техника B.E — Гражданское строительство B.Tech — Информационные технологии B.Tech — Химическая инженерияB.Tech — БиотехнологияB.Tech — Биомедицинская инженерияB.Arch — Бакалавр архитектурыB.Des. — Бакалавр дизайна, инженерные курсы (BE / B.Tech) — Неполный рабочий деньB.E — Компьютерные науки и инженерияB.E — Электротехника и электроникаB.E — Электроника и коммуникационная инженерияB.E — МашиностроениеB.E — Гражданское строительствоB.Tech — Химическая промышленность Инженерное искусство и естественные науки B.Б.А. — Бакалавр делового администрированияB.Com. — Бакалавр коммерцииB.Com. — Финансовый учет — Визуальная коммуникация, бакалавр наук — Медицинские лабораторные технологии, бакалавр наук — Клиника, питание и диетология. — Физика — Химия — Компьютерные науки — Математика — Биохимия, бакалавр наук. — Дизайн одежды — BioTechnologyB.Sc. — MicroBiologyB.Sc. — Психология — Английский — Биоинформатика и Data ScienceB.Sc — Специализация в области компьютерных наук в области искусственного интеллекта — Бакалавр наук по курсам сестринского права B.A. LL.B. (С отличием) B.B.A. LL.B. (С отличием) B.Com.LL.B. (С отличием) Бакалавр фармацевтических курсов, бакалавр фармации, степень бакалавра фармацевтики, диплом фармацевта, аспирантура, инженерные курсы Компьютерные науки и инженерия Прикладная электроника Компьютерный дизайн Структурная инженерия Силовая электроника и промышленные приводы Биотехнология Медицинское оборудование Встраиваемые системы и IoTM.Arch. Устойчивая архитектура Управление зданиемПрограмма управленияM.B.A — Магистр делового администрирования Заочно-аспирантE. Компьютерные науки и инженерия Прикладная электроника Компьютерный дизайн Структурная инженерия Медицинское оборудование Биотехнология Магистр делового администрированияПрием на курсы PPG Arts & Science MA — английский и бакалавр стоматологической хирургии (B.D.S) B.D.S — бакалавр стоматологической хирургии, магистр стоматологической хирургии (M.D.S) M.D.S — ортодонтия и челюстно-лицевая ортопедияM.D.S — консервативная стоматология и эндодонтияM.D.S — педодонтия и профилактическая стоматология
МАШИНЫ И МЕХАНИЗМЫ — MechanicalStuff4u
ТЕОРИЯ МАШИН
И
МЕХАНИЗМЫ
МАШИНА- Машина — это расположение части для выполнения работы, для подачи питания или изменения его направление.
МЕХАНИКА — это филиал наука, которая имеет дело с движениями, временем и силами. Он состоит из двух частей, статика и динамика.
- Статика занимается анализом стационарных систем. где время не имеет значения.
- Dynamics занимается анализом систем, меняются со временем. Он имеет две ветви, называемые кинематикой и кинетикой.
- Кинематика занимается изучением движения или изучение положения, перемещения, вращения, скорости, скорости и ускорение.
- Кинетика имеет дело с силами, действующими в системе.
KINEMATIC LINK- кинематическая ссылка устойчивое тело или совокупность устойчивых тел, составляющих часть или части машин, соединяющие другие части, движущиеся относительно нее.
СТРУКТУРА — это сборка устойчивые тела, между которыми отсутствует относительное движение. Пример — крыша фермы, мосты и др.
Разница между Машина и конструкция
МАШИНА | СТРУКТУРА |
|
|
|
|
КИНЕМАТИЧЕСКАЯ ПАРА — это соединение двух звеньев, которое позволяет относительное движение. Пример — кривошипно-шатунный механизм.
ВИДЫ КИНЕТИЧЕСКИХ ПАР
1) Раздвижной пара — когда два элемента пары соединены таким образом, что один элемент может скользить относительно другого.Пример — поршень и цилиндр, хвост приклад на станине токарного станка.
2) Токарная обработка пара — когда два элемента пары соединены таким образом, что один элемент может вращаться вокруг фиксированной оси другого звена. Пример — шпиндель токарного станка опирается на головной сток.
3) Вальцовка пара — когда два элемента пары соединены таким образом, что можно пролистайте другую фиксированную ссылку. Пример — шариковые и роликовые подшипники.
4) Винт пара — когда два элемента пары соединены таким образом, что один элемент может вращаться вокруг другого за счет винтовой резьбы.Пример — гайка и болт.
5) Сферический пара — когда два элемента пары соединены таким образом, что один элемент может вращаться вокруг другого фиксированного элемента. Пример — шаровой шарнир.
6) Нижняя пара — когда два элемента пары имеют контакт поверхности при относительном движении происходит и поверхность одного элемента скользит по поверхности другого элемент. Пример — скользящие, поворотные и винтовые пары.
7) Высшее пара — когда два элемента пары имеют прямой или точечный контакт, когда относительное движение занимает дворец, а движение между двумя элементами частично поворотные и частично скользящие.Пример — зубчатая передача.
ВИДОВ ОГРАНИЧЕННЫХ ДВИЖЕНИЙ-
1) Полностью Ограниченное движение — когда движение между парой ограничено определенным направление независимо от направления приложенной силы. Пример — движение квадратного стержня в квадратное отверстие.
2) Не полностью Ограниченное движение — когда движение между парой может происходить более чем за Одно направление. Пример — круглый стержень в круглом отверстии, где стержень может либо повернуть, либо задвинуть в отверстие.
3) Успешно ограниченное движение — когда движение между парой таково, что ограниченное движение завершается не само по себе, а другими способами. Пример — поршень совершает возвратно-поступательное движение внутри цилиндра двигателя.
КИНЕМАТИЧЕСКАЯ ЦЕПЬ-
Определяется как комбинация кинематических пар, соединенных таким образом, что каждое звено образует часть двух пар и относительное движение между звеньями полностью или успешно сдерживается. Когда зафиксировано одно звено, кинематическая цепь становится механизмом.
Связь между нет. пар (п) и № звеньев (л)
l = 2p — 4
Связь между нет. ссылок (l) и нет. стыков (к)
j = 3 / 2 л — 2
формула Клейна,
j + h / 2 = 3 / 2 л — 2
Когда Л.H.S> R.H.S, тогда цепь заблокирована.
Когда L.H.S < R.H.S, тогда цепь является неограниченной цепью.
Когда L.H.S = R.H.S, тогда цепь кинематическая.
МЕХАНИЗМ-
Когда один из звенья кинематической цепи фиксируются, тогда цепь называется механизмом. Это передает и изменяет движение. Процесс получения различных механизмов путем фиксация различных звеньев кинематической цепи называется инверсией механизм.
КИНЕМАТИЧЕСКИЕ ЦЕПИ И ИХ МЕХАНИЗМЫ —
- Четырехзвенная цепь или четырехзвенный цикл Цепь — состоит из четырех звеньев, каждое из которых образует вращающуюся пару.Перевороты четырехзвенного цепного механизма,
§ Кривошипно-рычажный механизм (колебательное движение) — Здесь кривошип может вращаться полностью, но ведомый может совершать только колебательные движения. Пример — лучевой двигатель.
§ Двойной кривошипно-шатунный механизм — вот в этой инверсии полный вращение кривошипа и толкателя. Пример — тяга тяга локомотива.
§ Двухрычажный механизм — пример — индикаторный механизм Ватта, пантограф.
- Ползун кривошипно-шатунный механизм- It состоит из трех поворотных пар и одной скользящей пары.Преобразует поворотный движение в возвратно-поступательное движение и находится в возвратно-поступательном движении пара двигатели. Обороты кривошипно-шатунного механизма ползуна,
§ 1 st инверсия — Пример — Двигатель внутреннего сгорания, насос, поршневой паровой двигатель.
§ 2 nd инверсия — получается путем сохранения соединительного стержень фиксированный. Он называется кривошипно-щелевым рычажным механизмом. Пример- качающийся цилиндровый двигатель.
§ 3 rd инверсия — Это достигается при фиксированном положении рукоятки.Пример — механизм быстрого возврата Whitworth. Этот механизм используется в формирователи.
- Цепь кривошипная двойная ползуна Механизм — состоит из двух пар скольжения и двух пар поворотных. В инверсия двойного ползуна кривошипно-цепного механизма,
§ Трамвай эллиптические
§ Кулисный механизм
§ Oldham’s муфта
Lab Manual | Изучить различные типы кинематических звеньев, пар, цепей и механизмов
Для изучения различных типов кинематических звеньев, пар, цепей и механизмов.
ИСПОЛЬЗУЕМЫЙ АППАРАТ: — Кинематические звенья, пары, цепи и механизмы.
ТЕОРИЯ: —
1. Определения кинематических звеньев, пар, цепей и механизмов.
2. Классификации кинематических звеньев, пар, цепей и механизмов.
3. Схемы кинематических звеньев, пар, цепей и механизмов
4 Преимущества и недостатки кинематических звеньев, пар, цепей и механизмов.
5.Применение кинематического звена, пар, цепей и механизмов
6. Примеры кинематических звеньев, Пары, цепи и механизмы.
КИНЕМАТИЧЕСКАЯ СВЯЗЬ: — Механизм состоит из ряда устойчивых тел, некоторые из которых могут двигаться относительно других. Устойчивое тело или группа устойчивых тел с жесткими связями, предотвращающими их относительное движение, называется связью. Ссылка, также известная как кинематическая ссылка или элемент.
Примеры: — Кривошипно-скользящий механизм состоит из четырех звеньев: рамы и направляющих, шатуна и ползуна кривошипа, коленчатый рычаг может также иметь коленчатый вал и маховик, образуя одно звено, не имеющее относительного движения.
КЛАССИФИКАЦИЯ ССЫЛОК: —
1. Бинарная ссылка
2. Тройное звено
3. Четвертичное звено
КИНЕМАТИЧЕСКАЯ ПАРА: — Кинематическая пара или просто пара — это соединение двух звеньев, между которыми имеется относительное движение.
КЛАССИФИКАЦИЯ ПАР:
1-кинематические пары по характеру контакта: —
(i) Нижняя пара (звенья, имеющие контакт поверхности или площади)
Примеры — Гайка на винте, вал, вращающийся в подшипнике, карданном шарнире и т. Д.
(ii) Высшая пара (точечный или линейный контакт между звеньями)
Примеры: — при качении по поверхности, пара кулачков и толкателей, зубчатые передачи, шариковые и роликовые подшипники и т. Д.
2- Кинематические пары в зависимости от характера механического ограничения: —
(a) Замкнутая пара (когда элементы пары скрепляются механически)
Примеры: — все младшие пары и некоторые старшие пары
(b) Незамкнутая пара (когда два звена пары находятся в контакте либо из-за силы тяжести, либо из-за действия пружины), Пример: — пара кулачка и толкателя.
3-кинематические пары по характеру относительного движения: —
(i) Скользящая пара
(ii) Поворотная пара
(iii) Катящаяся пара
(iv) Винтовая пара (Винтовая пара)
(в) Сферическая пара
КИНЕМАТИЧЕСКАЯ ЦЕПЬ: — Кинематическая цепь — это совокупность звеньев, в которой возможны относительные движения звеньев и движение каждого относительно других определено. Если неопределенные движения других звеньев, это некинематическая цепь.
Типы кинематических цепей: —
(i) Цепь с четырьмя звеньями или цепь с квадратичным циклом
(ii) Кривошипная цепь с одинарным ползуном
(iii) Кривошипная цепь с двумя ползунами
МЕХАНИЗМ: — Связь получается, если одно из звеньев кинематической цепи прикреплено к земле. Если движение одного звена приводит к определенному движению других, такое звено называют механизмом. Если одно из звеньев резервной цепи зафиксировано, это называется структурой.Степень свободы конструкции равна нулю или меньше. Конструкция с отрицательной степенью свободы называется надстройкой.
НАБЛЮДЕНИЕ И ЗАКЛЮЧЕНИЕ: —
1. Сравнение кинематических звеньев, пар, цепей и механизмов.
2. Названный тип движения.
VIVA-ВОПРОСЫ: —
a) Определите машину и структуру.
б) Понятие кинематики звеньев, пар, цепей и механизма.