Кинематические цепи и их классификация — Студопедия
Определения: машина, механизм, звено механизма, виды звеньев
Машинойназывается искусственные устройства, выполняющие механические движения для преобразования энергии, материалов и информации. Основной признак машин – совершение некоторой полезной работы. Механизмом называют искусственно созданную систему тел, предназначенную для преобразования механического движения одного или нескольких требуемых движений других тел. Звеньями называют твёрдые тела, входящие в состав механизма и обладающие относительной подвижностью. Звенья могут состоять из одной или несколько жёстко связанных между собой частей, называемых деталями.
Классификация звеньев:
Стойка – неподвижное звено механизма (обозначают нулевой позицией)
Кривошип – звено, совершающее вращательное движение вокруг неподвижной оси.
Коромысло – звено, совершающее угловые качательные движения вокруг неподвижной оси.
Ползун – звено, совершающее линейные возвратно-поступательные движения.
Шатун – звено, совершающее плоскопараллельное движение.
Кулиса – звено, являющееся подвижно направляющее для ползуна (шатуна).
Кулачок – звено, кривизна профиля которого определяет закон движения связанного с ним звена, толкателя.
Зубчатое колесо
Кинематические пары и их классификация
Кинематической парой называются подвижные соединения двух соприкасающихся звеньев.
Любая кинематическая пара ограничивает взаимное движение звеньев, т.е. исключает одну или несколько степеней свободы.
Классификация кинематических пар:
По характеру относительного движения:
плоские – движение в одной плоскости
пространственные – движения в разных плоскостях
По характеру соприкосновения:
высшие – соприкосновение звеньев происходит по линии или точке (рельс)
низшие – соприкосновение звеньев происходит по поверхности (ползун)
По количеству условий связей, налагаемых кинематической парой на относительное движение звеньев.
Ограничение, налагаемое на движение звеньев, называется связями.
Классом кинематической пары называется число S условий связи, налагаемых кинематической парой на относительное движение звеньев.
S – число условий связи
H – число степеней свободы
Кинематические цепи и их классификация
Кинематическая цепь – связанная система звеньев, образующих между собой кинематические пары.
Классификация кинематических цепей:
Плоские – при закреплении одного звена, остальные звенья совершают плоское движение, параллельно некоторой неподвижной плоскости.
Пространственные – при закрепление одного звена, остальные звенья совершают движение в различных плоскостях.
Простые – в каждое звено входит не более, чем две кинематические пары.
Сложные – хотя бы одно звено имеет более двух кинематических пар.
Замкнутые – входит не более чем две кинематические пары, и эти звенья образуют один или несколько замкнутых контуров
Разомкнутые – звенья не образуют замкнутый контур.
Кинематическая цепь и механизм — Лекции и примеры решения задач технической механики
Кинематическая цепь
Кинематическая цепь – это сочетание звеньев, соединенных в кинематические пары. Имеется определенная классификация кинематических цепей – цепи могут быть простыми и сложными, замкнутыми (закрытыми) и разомкнутыми (открытыми), пространственными и плоскими.
Ранее считалось, что механизм может быть сформирован только на основе замкнутой цепи. Однако с развитием робототехники в качестве механизмов стали широко применяться разомкнутые (открытые) цепи. Поэтому данная классификация в некоторой степени утратила свое первоначальное значение.
Механизм
Механизмом
называется кинематическая цепь, имеющая стойку (т.е. звено, принятое за неподвижное), в которой движение одного или нескольких звеньев полностью определяет характер движения остальных звеньев этой цепи.Другими словами, — это кинематическая цепь, обладающая определенностью движения всех звеньев. Только одним звеньям дается принудительное движение (определенным образом задаются их законы движения, например, подсоединением к двигателю), а другие получают движение от этих звеньев. В итоге механизм можно трактовать как механическую систему тел, предназначенную для преобразования, движения одного или нескольких тел в требуемое движение других тел.
Звенья, законы движения которых заданы, называются входными.
Звенья, законы которых надо определить, называются выходными. Количество входных звеньев определяется числом степеней свободы кинематической цепи, положенной в основу данного механизма.
Понятия входное и выходное (вход и выход) – это кинематическая характеристика. Не надо путать с понятиями – ведущее звено и ведомое звено. Ведущим звеном называется звено, к которому подводится мощность;
ведомое звено – звено, с которого снимается мощность (для выполнения полезной работы).
Таким образом, понятия ведущее и ведомое звено – это силовая (энергетическая) характеристика. Однако в подавляющем большинстве случаев входное звено одновременно является и ведущим, выходное звено – ведомым.
Основные виды механизмов >
Курсовой проект по ТММ >
Кинематическая цепь — SportWiki энциклопедия
Кинематическая цепь (к.ц.) — последовательное соединение ряда относительно подвижных кинематических пар (рука, нога или все тело спортсмена). В зависимости от наложенных на тело связей, различают три основных вида кинематической цепи, важных для понимания техники спортивного движения.
- свободная кинематическая цепь (при безопорных движениях)
- открытая или незамкнутая кинематическая цепь (с фиксацией одного ее конца в положениях типа стоек на руках, ногах, висов, а также при движениях свободной конечности — мах рукой, ногой и т. п.)
- закрытая или замкнутая кинематическая цепь (положения при фиксированных обоих концах кинематической цепи, например — с одновременной опорой руками и ногами).
Открытая или незамкнутая кинематическая цепь[править | править код]
С точки зрения управления движением наиболее важен случай открытой кинематической цепи, при которой сохраняются возможности опорного энергетического взаимодействия с одновременными активными действиями высокомобильными периферическими звеньями. Степени свободы звеньев открытой кинематической цепи зависят от положения звена относительно опоры. Потенциально наиболее подвижны и энергонасыщенны периферические звенья кинематической цепи, например, рука метателя при броске. Вместе с тем чем больше степеней свободы у звена, тем выше риск двигательной ошибки. Одна из сторон кинематики опорно-двигательный аппарат связана с подвижностью в суставах, которая зависит от ряда факторов. Один из них носит принципиально морфологический характер: шаровидные суставы (плечевой, тазобедренный) допускают трехосное вращение звена, а блоковидные (локтевой) имеют лишь одну степень свободы.
В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях (если не учитывать взаимодействия мышц) . Например, свободные конечности, когда их концевые звенья свободны, представляют незамкнутые цепи. Замкнутыми кинематическими цепями в теле человека являются, например, грудина, ребро, позвоночник, ребро и снова грудина.
Закрытая или замкнутая кинематическая цепь[править | править код]
Такие замкнутые цепи разомкнуть невозможно. Незамкнутые могут замыкаться, причем часто через опору. В сложной пирамиде, составленной несколькими акробатами, образуются даже своего рода «сети» (в плоскости) и «решетки» ( в пространстве) с очень сложной взаимной зависимостью движений звеньев.
В замкнутой или замкнувшейся цепи невозможно изолированное движение, т.е. движение в одиночном сочленении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других.
Таким образом, движения в незамкнутых цепях характеризуются относительной независимостью звеньев. В замкнутых же, а также замкнувшихся цепях движения одних звеньев влияют на движения даже отдаленных звеньев (помогают или мешают).
В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых.
В открытой кинематической цепи подвижность каждого следующего звена равна его собственной подвижности плюс подвижность предыдущих звеньев. Так, если у бедра три степени свободы, а у голени относительно бедра еще две степени, то голень относительно таза имеет пять степеней свободы. Наибольшие возможности движений — у конечных звеньев цепи. Но больше шести степеней свободы конечное звено цепи иметь не может. Если же при суммировании степеней свободы получается, что конечное звено имеет их больше шести, то это только значит, что при фиксировании этого звена промежуточные звенья сохраняют степени свободы на шесть степеней меньше. Так, кисть имеет относительно лопатки семь степеней свободы (плечевой сустав — 3, плюс локтевой — 2, плюс лучезапястный — 2) . Если положить кисть на стол, то плечо и предплечье сохраняют 7-6=1 степень свободы. Они смогут двигаться лишь по одной траектории, вокруг оси, соединяющей плечевой и лучезапястный суставы.
Кости, соединенные подвижно, образуют основу биокинематических цепей. Приложенные к ним силы (мышечные тяги и др.) действуют на звенья биокинематической цепи, как на рычаги. Это позволяет передавать действие силы по цепям, а также изменять эффект приложения сил. Таким образом, рычаг как простейший механизм служит для передачи движения и силы на расстояние.
Рычаги[править | править код]
Различают рычаги первого рода
(двуплечий) и второго рода (одноплечий) . Первый характеризуется тем, что две группы сил приложены по обе стороны от оси (точки опоры) рычага, а во втором случае — по одну сторону.Вне зависимости от вида рычага в каждом из них выделяют:
- точку опоры;
- точку приложения сил;
- плечи рычага (расстояние от точки опоры до места приложения сил) ;
- плечи сил (длина перпендикуляра, опущенного из точки опоры на линию действия силы) .
Мерой действия силы на рычаг служит ее момент относительно точки опоры. Поэтому для равновесия либо равномерного вращательного движения звена как рычага необходимо, чтобы противоположно направленные моменты сил относительно оси рычага были равны. Для ускорения (торможения) звена один момент силы должен быть больше другого. Так, момент движущих сил, преобладая над моментом тормозящих сил, придает звену положительное ускорение (в сторону движения) . Если же большим оказывается момент тормозящих сил, то он вызывает торможение звена.
С помощью рычага можно выиграть в силе. Для этого нужно действовать мышечной силой на более длинное плечо. Согласно «золотому правилу механики», выигрывая в силе, одновременно проигрываем в пути и в скорости. Наоборот, если действовать мышечной силой на короткое плечо, то можно выиграть в пути и в скорости за счет проигрыша в силе.
В большинстве случаев мышцы прикрепляются недалеко от сустава и подходят к кости под острым углом. Поэтому плечо силы тяги мышцы, как правило, небольшое. Обычно плечо силы тяги мышц меньше плеча силы сопротивления, и, следовательно, при работе мышцы получается проигрыш в силе и выигрыш в пути и в скорости движения. Для некоторого увеличения плеча силы тяги мышц большое значение имеют костные выступы, бугры, сесамовидные косточки, к которым мышцы прикрепляются или через которые они переходят . Выступы, бугры, сесамовидные косточки увеличивают угол подхода мышцы к кости как к рычагу, тем самым увеличивают плечо силы тяги мышцы и момент вращения мышечной силы. Таким образом, можно выделить две причины проигрыша в силе. Первая — прикрепление мышцы вблизи сустава, вторая — тяга мышцы вдоль кости под очень острым (или тупым) углом.
Можно указать еще и на третью причину некоторых потерь в силе мышц. При больших нагрузках напрягаются все мышцы, окружающие сустав. Мышцы-антагонисты, создавая моменты сил, которые направлены противоположно, полезной работы не производят, а энергию затрачивают. Но в конечном счете в этом есть определенный смысл: хотя и возникают потери энергии, сустав во время больших нагрузок получает укрепление напряжением мышц, которые его окружают.
В связи с особенностями приложения мышечных тяг к костным рычагам необходимы весьма значительные напряжения мышц для выполнения не только силовых, но и скоростных движении. При этом следует помнить, что входящие в биокинематические цепи звенья тела образуют системы составных рычагов, в которых «золотое правило» механики проявляется намного сложнее, чем в простых одиночных рычагах.
Амплитуда движений[править | править код]
Амплитуда движений в суставах зависит как от морфологии сустава (с пределами, определенными костной конструкцией сустава), так и от податливости мягких тканей, окружающих сустав (суставная сумка, прилегающий мышечно-связочный аппарат). Последняя может изменяться в процессе тренировки и является предметом специальных занятий на гибкость и подвижность в суставах. Одним из аспектов кинематики опорно-двигательный аппарат спортсмена является также аксиальная взаимосвязь движений в суставах пояса верхних конечностей. Так, одновременное сочетание движений на разгибание плеча с супинацией руки (или сгибания плеча с одновременной пронацией) позволяет осуществлять вращательные движения в поясе верхних конечностей без ограничений по углу поворота, что обеспечивает щадящий режим работы сустава. Противоположное сочетание движений (разгибание с пронацией, сгибание с супинацией) вызывает форсированную, предельную деформацию мягких тканей плеча, чреватую травмой. Вместе с тем именно такой режим работы может быть использован для развития подвижности в суставах.
Кинематические пары и кинематические цепи — Студопедия
Для групп 151, 152, 153
Раздел «Детали машин»
Основные понятия деталей машин
Детали машин – научная дисциплина, в которой рассматриваются основные детали и узлы общего назначения, встречающиеся в различных механизмах, установках и машинах, которые также применяются и авиации.
Целью курса «Детали машин» является изучение устройства, принципа работы, вопросов расчета деталей машин и механизмов общего назначения.
Машину характеризуют следующие признаки:
— преобразование энергии в механическую работу или преобразование механической работы в другой вид энергии;
— определенность движения всех ее частей при заданном движении одной части;
— искусственность происхождения в результате труда человека.
Машина— механизм или сочетание механизмов, которые служат для облегчения или замены физического или умственного труда человека и повышения его производительности.
Машина– механизм или сочетание механизмов, которые служат для преобразования одного вида энергии в другой или для выполнения полезной работы.
В зависимости от назначения различают
— машины энергетические преобразуют один вид энергии в другой,
— машины рабочие (орудия) изменяют форму, свойства, состояние, положения предмета и информации.
Энергетические машины подразделяются на:
— машины – двигатели преобразуют энергию любого вида (электрическую, тепловую) в механическую энергию.
— машины – генераторы преобразуют механическую энергию в другой вид энергии.
Рабочие машины бывают:
— технологические изменяют форму и размеры заготовок,
— подъемно-транспортные перемещают грузы, людей,
— вычислительные преобразуют информацию.
Все машины состоят из деталей, которые объединены в узлы (сборочные единицы).
Деталью принято называть элемент конструкции, изготовленный из материала одной марки без применения сборочных операций (например, болт, гайка, вал и т. д.)
Совокупность деталей, соединенных на предприятии-изготовителе сборочными операциями (завинчиванием, сваркой ) и предназначенных для совместной работы, называют сборочной единицей (узлом).
Узел — сборочная единица, имеющая вполне определенное функциональное назначение.
Характерными примерами узлов являются (по мере нарастания сложности) подшипник, узел опоры, редуктор и т. и.
Механизм –устройство ( искусственно созданная система тел), предназначенное для преобразования движения одного или нескольких тел в требуемые движения других тел.
Сборочные единицы и детали можно разделить на элементы общего назначения (болты, гайки, зубчатые колеса, валы и др.) и элементы специального назначения, которые используются в специальных типах машин (шнек, поршень, цилиндр и др.)
Кинематические пары и кинематические цепи
Наблюдая за работой любой машины, можно лишь удивляться определенности и целесообразности движения каждого звена. Это достигается за счет ограничения свободы движения того или иного узла во всех направлениях кроме заданного.
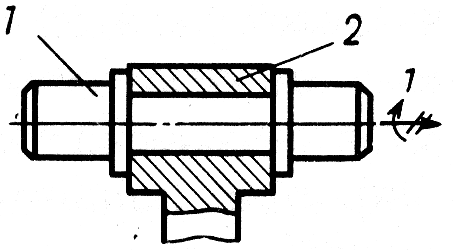
 | Ползун 3 кривошипно-ползунного механизма движется лишь поступательно, поскольку движение во всех направлениях ограничено стойкой. |
Таким образом, гарантией определенности движения является ограничение ряда степеней свободы.
Кинематической парой называется соединение двух соприкасающихся тел, обеспечивающее их относительную подвижность.
Например, поршень и цилиндр, вал и подшипник и др.
Тела, составляющие кинематическую пару, называются звеньями.
В каждой паре совместно работающих звеньев различают ведущее и ведомое звено.
Звенья цепи, которые приводятся в движение извне, называются ведущими.
Звенья цепи, совершающие под действием ведущих преобразованное движение, называются ведомыми
Входным звеном называют звено, которому сообщается движение, преобразуемое в движения других звеньев.
Выходным звеном называют звено, совершающее движение, для выполнения которого предназначен механизм.
Между входным и выходным звеньями могут распологаться промежуточные звенья.
Звено, принимаемое за неподвижное, называется стойкой.
По характеру соприкосновения элементов кинематические пары делятся на два основных класса: низшие и высшие.
У низших кинематических пар соприкосновение звеньев происходит по поверхностям, а у высших — по линиям или точкам.
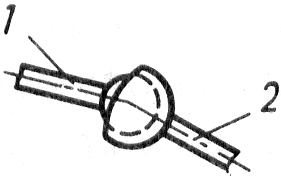
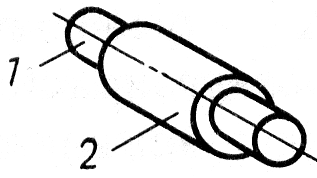
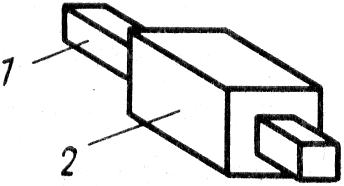
Низшие кинематические пары:
а — цилиндр 1 и поршень со штоком 2;
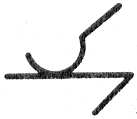
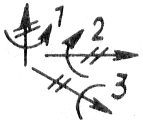
2) Высшие кинематические пары:
1) колесо и рельс — соприкосновение по линии 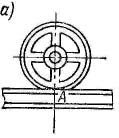
Система подвижно соединенных звеньев, состоящая из ряда кинематических пар, называетсякинематической цепью.
В основе всякого механизма лежит кинематическая цепь.
Механизм –кинематическая цепь, используемая для передачи движения с необходимым его преобразованием от ведущих звеньев к ведомым.
Кинематические пары и цепи — Энциклопедия по машиностроению XXL
Совокупность кинематических пар называется кинематической цепью. Кинематические пары и цепи могут быть плоскими и пространственными. [c.77]Основные определения теории механизмов и машин изложены в 9.2 настоящей книги, из которого видно, что кинематические пары и цепи могут быть плоскими и пространственными. Звенья плоских механизмов совершают плоскопараллельное движение. [c.169]
Кинематические пары и цепи [c.172]
Детали, звенья, кинематические пары и цепи и их классификация [c.12]
До сих пор рассматривались кинематические пары и цепи, образованные твердыми звеньями. В некоторых кинематических цепях используются звенья гибкие, жидкие и газообразные. [c.16]
Классификация подвижных звеньев, кинематических пар и цепей была рассмотрена в предыдущей главе. В данной главе рассмотрим остальные этапы структурного анализа механизмов. [c.52]КИНЕМАТИЧЕСКИЕ ПАРЫ И КИНЕМАТИЧЕСКИЕ ЦЕПИ [c.21]
В задаче о положениях открытой цепи по заданным значениям ее обобщенных координат нужно в системе координат О , связанной со стойкой, определить проекции единичных векторов осей кинематических пар и звеньев, а также абсолютные координаты интересующих нас точек. [c.179]
Однако в целом ряде случаев приходится сознательно проектировать и изготавливать статически неопределимые механизмы с избыточными связями для обеспечения нужной прочности и жесткости системы, особенно при передаче больших сил. Следует различать избыточные, или добавочные, связи в кинематических парах и в кинематических цепях механизма. Так, например, (рис. 2.13) коленчатый вал четырехцилиндрового двигателя образует с подшипником А одноподвижную вращательную пару, что вполне достаточно с точки зрения кинематики данного механизма с одной степенью свободы (VT= 1). Однако, учитывая большую длин
1.2 Кинематические цепи и соединения
Система звеньев, соединенных с помощью кинематических пар, называется кинематической цепью.
Кинематические цепи условно делятся на плоские (при движении звеньев в плоскости) и пространственные.
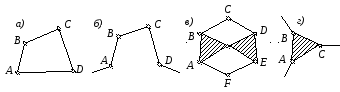
В зависимости от строения различают замкнутые и незамкнутые кинематические цепи. В замкнутой кинематической цепи каждое звено входит не менее чем в две кинематические пары (рис.2,а,в). В незамкнутой (открытой) кинематической цепи имеются звенья, входящие лишь в одну кинематическую пару (рис.2,б,г). В замкнутой цепи звенья образуют один или несколько контуров.
 По
степени разветвленности кинематические
цепи делят напростые и сложные.
Простой называют кинематическую цепь, у которой
каждое звено входит в соединения с
другими звеньями с помощью одной или
двух кинематических пар (рис.2,а,б). Сложной называют кинематическую цепь, у которой
есть звенья, связанные с другими звеньями
более чем двумя кинематическими парами
(рис.2,в,г).
По
степени разветвленности кинематические
цепи делят напростые и сложные.
Простой называют кинематическую цепь, у которой
каждое звено входит в соединения с
другими звеньями с помощью одной или
двух кинематических пар (рис.2,а,б). Сложной называют кинематическую цепь, у которой
есть звенья, связанные с другими звеньями
более чем двумя кинематическими парами
(рис.2,в,г).
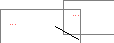
Рис.2. Кинематические цепи: а – замкнутая простая; б – разомкнутая простая; в – замкнутая сложная; г) разомкнутая сложная
Таблица 1.1
Класс пары | Число условий связи | Название пары | Схематическое изображение | Условное обозначение |
I | 1 | Шар-плоскость |
|
|
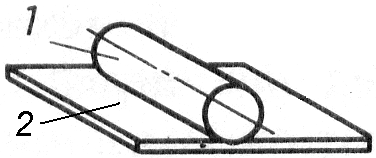
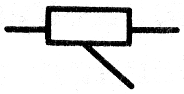
II | 2 | Цилиндр-плоскость |
|
|
III | 3 | Сферическая |
|
|
III | 3 | Плоскостная |
|
|
IV | 4 | Цилиндри-ческая |
|
|
IV | 4 | Сферическая с пальцем |
|
|
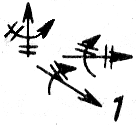
V | 5 | Поступа-тельная |
|
|
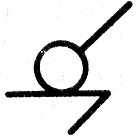
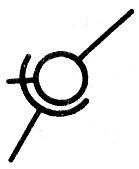
V | 5 | Вращатель-ная |
|
|
V | 5 | Винтовая |
|





В реальных конструкциях часто используются кинематические соединения.
К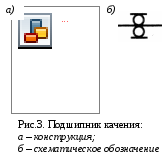 инематическое
соединение – кинематическая цепь с числом звеньев
более двух, эквивалентная заменяющей
кинематической паре, но отличающаяся
по своей конструкции.
инематическое
соединение – кинематическая цепь с числом звеньев
более двух, эквивалентная заменяющей
кинематической паре, но отличающаяся
по своей конструкции.
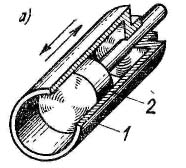
Примером кинематического соединения может служить подшип-ник качения (рис.3). В его состав (рис.3,а) входят наружное 1 и внут-реннее 2 кольца, между которыми находятся шарики 3, удерживаемые на определенном расстоянии друг относительно друга сепаратором 4. На рис.3,б показано условное обозна-чение подшипника. Подшипник со-держит несколько подвижных звеньев и несколько кинематических пар. Од-нако только два звена (наружное и внутреннее кольца) соединяются с другими звеньями механизма. Причем кольца подшипника вращаются друг относительно друга. Поэтому заменяющей кинематической парой будет вращательная пара. Такая замена существенно упрощает структурную схему механизма, принципиально не меняя ее сути.
Таким образом, механизм – это кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья движутся определенным образом.
Машиностроение. Кинематическая цепь станка и передаточные отношения
28 сентября 2012 3505 0Источниками движения в МРС служат электродвигатели (асинхронный, постоянного тока, линейный) и исполнительные органы движения по кинематическим цепям, состоящим из отдельных звеньев – кинематических пар. Кинематические цепи служат также для изменения скоростей и направлений движений отдельных узлов станка и преобразования одного вида движения в другое. Кинематическая цепь станка состоит в общем случае из различных передач – ременных, зубчатых, червячных и др. – расположенных в определенной последовательности.
Основным кинематическим параметром, характеризующим передачу, является передаточное отношение, т.е. отношение частоты вращения ведомого вала nвм к частоте вращения ведущего вала nвщ, т.е.:
i=nвм/nвщ
Отсюда следует, что для ременной передачи:
ip=Dвщ/Dвм
где Dвщ и Dвм — диаметры шкивов соответственно ведущего вала и ведомого вала.
Для зубчатых колес:
iz=Zвщ/Zвм
где Zвщ, Zвм — число зубьев соответственно на шестернях ведущего вала и ведомого вала.
Для червячной передачи:
iчерв=К/Z
где К — число заходов червяка, Z — число зубьев червячного колеса.
При последовательном расположении отдельных передач c передаточными отношениями i1, i2, i3 . . . . . их общее передаточное отношение:
i=i1.i2. i3. . . . .
Преобразующие передачи.
Винтовая передача: H=K.t — поступательное движение гайки при вращательном движении винта
где K — число заходов, t — шаг винта.
Реечная передача: π . m . Z — поступательное движение рейки при вращательном движении зубчатого колеса
где m — модуль, Z — число зубьев колеса.
Кинематические и кинетические цепи
Ниже приводится эксклюзивный отрывок из книги NSCA’s Essentials of Personal Training, Second Edition , опубликованной Human Kinetics. Весь текст и изображения предоставлены Human Kinetics.
В технике ряд связей называется кинематической цепью. Если два конца ряда закреплены, цепь называется замкнутой.Если оконечный конец одного звена не закреплен, цепь называется открытой. Функциональным следствием замкнутой цепи является то, что движение одного сустава заставляет каждый другой сустав двигаться предсказуемым образом. На открытые цепи не распространяются эти ограничения: движение в одном суставе не обязательно вызывает движение в другом суставе.
В середине 1950-х годов Штейндлер (28) предположил, что тело действует как кинетическая цепь. Он описал открытую кинетическую цепь как «комбинацию, в которой концевой сустав свободен», а замкнутую кинетическую цепь как одну, «в которой концевой сустав встречает некоторое значительное внешнее сопротивление, которое запрещает или ограничивает свободное движение.Штейндлер отметил, что цепь является «строго и абсолютно замкнутой» только тогда, когда не происходит видимого движения, однако он считал приемлемым «применять этот термин во всех ситуациях, в которых периферийное соединение цепи встречает подавляющее внешнее сопротивление». Это часто интерпретируется как фиксированный конечный сегмент (рука, ступня).
Обратите внимание, что Steindler использовал термин кинетика (силы), тогда как инженеры использовали термин кинематика (движение), но, похоже, они говорят об одном и том же.«Кинетическая цепь» не используется в машиностроении или робототехнике, потому что кинематическая цепь — это технически правильное описание. Тем не менее, термин кинетическая цепь чаще используется в публикациях по упражнениям, если не взаимозаменяемо с кинематической цепью.
Штейндлер признал, что цепочка редко бывает «строго и абсолютно закрытой». Это очевидно, если мы посмотрим на физическое описание, но его определение все еще сбивает с толку, потому что он никогда не описывал «значительное» внешнее сопротивление. Например, приседания и жим ногами кинематически и кинетически подобны (10), но конечный сегмент (стопа) фиксируется во время приседания и движется во время жима ногами.Точно так же жим лежа и отжимание имеют схожие паттерны мышечной активации во всем диапазоне движений (4), даже когда сопротивление вряд ли можно охарактеризовать как «значительное».
Можно было бы получить больше пользы от терминов, глядя на функциональные последствия, а не на физические описания движения. Открытая цепь — это цепь, в которой движение одного сустава не зависит от других суставов в цепи, в то время как закрытая цепь — это цепочка, в которой движение одного сустава заставляет другие суставы в цепи двигаться предсказуемым образом (20).Таким образом, движение открытой цепи обычно включает в себя движение одного сустава (например, сгибание рук, сгибание ног) против некоторой формы углового сопротивления. Движение с замкнутой цепью включает в себя движение нескольких суставов, обычно против линейного сопротивления (например, жим лежа, приседания).
Важность распознавания активности замкнутой цепи заключается в том, что движения нескольких суставов связаны (36). Например, при стоянии в положении с опорой на вес и выполнении приседаний сгибание колена не может происходить без одновременного сгибания бедра и тыльного сгибания голеностопного сустава.Ограничение диапазона движения любого из суставов влияет на диапазон движения всего упражнения. Точно так же крутящие моменты в суставах также связаны: когда человек опускается в положении на корточках и увеличивает углы сгибания суставов, все мышцы в цепи увеличивают свои внутренние крутящие моменты. Следовательно, слабость в одном суставе ограничивает выполнение всего движения.
Основы персонального обучения NSCA, второе издание — это авторитетный текст для персональных тренеров, инструкторов по здоровью и фитнесу и других профессионалов в области фитнеса, а также основной источник подготовки для сдающих экзамен NSCA-CPT.Книга доступна в книжных магазинах повсюду, а также в Интернете по адресу NSCA Store .
.Кинематическая цепь — определение кинематической цепи из The Free Dictionary
n1. гибкая длина металлических звеньев, используемых для удержания, соединения, вытягивания и т. Д. Или в украшениях
2. (обычно множественное число ) все, что ограничивает, сковывает или сдерживает: цепи бедности.
3. (Automotive Engineering) ( обычно множественное число ) Также называется: цепи противоскольжения набор металлических звеньев, которые надеваются на шину автомобиля для увеличения тяги и уменьшения скольжения на обледенелой поверхности
4 . (Торговля)а. количество заведений, таких как отели, магазины и т. Д., У которых один и тот же владелец или руководство
b. ( как модификатор ): сетевой магазин.
5. серия связанных или связанных фактов, событий и т. Д.
6. (торговля) серия сделок, каждая из которых зависит от покупателя, который продает, прежде чем он сможет купить
7. (логика ) (рассуждения) последовательность аргументов, каждый из которых принимает заключение предыдущего как предпосылку.См. (В качестве примера) сориты8. (единицы) Также называется: Цепь Гюнтера единица длины, равная 22 ярдам
9. (единицы) Также называется: инженерная цепь единица длины равно 100 футам
10. (Химия) chem два или более атомов или групп, связанных вместе так, что конфигурация образующейся молекулы, иона или радикала напоминает цепочку. См. Также разомкнутую цепь, кольцо 1 1811. (физическая география) география ряд природных объектов, в частности, приблизительно параллельные горные цепи
12. вне цепочки неофициальный Austral и NZ свободный от ответственности
13. рвать чью-то цепь дергать чью-то цепь неформально дразнить, вводить в заблуждение или беспокоить кого-то
vb14. (геодезия) геодезия для измерения с помощью цепи или ленты 150004
(часто следуют: до ), чтобы ограничить, связать или закрепить цепью или как будто цепочкой
16. (Вязание и шитье) для шитья цепным стежком
n(Биография) Сэр Эрнст Борис. 1906–79, британский биохимик, родился в Германии: очищенный и адаптированный для клинического применения пенициллин; с Флемингом и Флори разделили Нобелевскую премию по физиологии и медицине 1945
.