Как устроена атомная подлодка — Naked Science
Принцип действия субмарины
Система погружения и всплытия подводной лодки включает в себя балластные и вспомогательные цистерны, а также соединительные трубопроводы и арматуру. Основной элемент здесь – это цистерны главного балласта, за счет заполнения водой которых погашается основной запас плавучести ПЛ. Все цистерны входят в носовую, кормовую и среднюю группы. Их можно заполнять и продувать по очереди или одновременно.

У подлодки есть дифферентные цистерны, необходимые для компенсации продольного смещения грузов. Балласт между дифферентными цистернами передувается при помощи сжатого воздуха или же перекачивается с помощью специальных помп. Дифферентовка – именно так называется прием, целью которого является «уравновешивание» погруженной ПЛ.

Атомные подлодки делят на поколения. Для первого (50-е) характерна относительно высокая шумность и несовершенство гидроакустических систем. Второе поколение строили в 60-е – 70-е годы: форма корпуса была оптимизирована, чтобы увеличить скорость. Лодки третьего больше, на них также появилось оборудование для радиоэлектронной борьбы. Для АПЛ четвертого поколения характерны беспрецедентно малый уровень шума и продвинутая электроника. Облик лодок пятого поколения прорабатывается в наши дни.
Важный компонент любой субмарины – воздушная система. Погружение, всплытие, удаление отходов – все это делается при помощи сжатого воздуха. Последний хранят под высоким давлением на борту ПЛ: так он занимает меньше места и позволяет аккумулировать больше энергии. Воздух высокого давления находится в специальных баллонах: как правило, за его количеством следит старший механик. Пополняются запасы сжатого воздуха при всплытии. Это долгая и трудоемкая процедура, требующая особого внимания. Чтобы экипажу лодки было чем дышать, на борту субмарины размещены установки регенерации воздуха, позволяющие получать кислород из забортной воды.
АПЛ: какие они бывают
Атомная лодка имеет ядерную силовую установку (откуда, собственно, и пошло название). В наше время многие страны также эксплуатируют дизель-электрические подлодки (ПЛ). Уровень автономности атомных субмарин намного выше, и они могут выполнять более широкий круг задач. Американцы и англичане вообще прекратили использовать неатомные подлодки, российский же подводный флот имеет смешанный состав. Вообще, только пять стран имеют атомные подлодки. Кроме США и РФ в «клуб избранных» входят Франция, Англия и Китай. Остальные морские державы используют дизель-электрические субмарины.
Будущее российского подводного флота связано с двумя новыми атомными субмаринами. Речь идет о многоцелевых лодках проекта 885 «Ясень» и ракетных подводных крейсерах стратегического назначения 955 «Борей». Лодок проекта 885 построят восемь единиц, а число «Бореев» достигнет семи. Российский подводный флот нельзя будет сравнить с американским (США будут иметь десятки новых субмарин), но он будет занимать вторую строчку мирового рейтинга.

Русские и американские лодки отличаются по своей архитектуре. США делают свои АПЛ однокорпусными (корпус и противостоит давлению, и имеет обтекаемую форму), а Россия – двухкорпусными: в этом случае есть внутренний грубый прочный корпус и внешний обтекаемый легкий. На атомных подлодках проекта 949А «Антей», к числу которых относился и печально известный «Курск», расстояние между корпусами составляет 3,5 м. Считается, что двухкорпусные лодки более живучи, в то время как однокорпусные при прочих равных имеют меньший вес. У однокорпусных лодок цистерны главного балласта, обеспечивающие всплытие и погружение, находятся внутри прочного корпуса, а у двухкорпусных – внутри легкого внешнего. Каждая отечественная субмарина должна выжить, если любой отсек будет полностью затоплен водой – это одно из главных требований для подлодок.
В целом, наблюдается тенденция к переходу на однокорпусные АПЛ, так как новейшая сталь, из которой выполнены корпуса американских лодок, позволяет выдерживать колоссальные нагрузки на глубине и обеспечивает субмарине высокий уровень живучести. Речь, в частности, идет о высокопрочной стали марки HY-80/100 с пределом текучести 56-84 кгс/мм. Очевидно, в будущем применят еще более совершенные материалы.
Существуют также лодки с корпусом смешанного типа (когда легкий корпус перекрывает основной лишь частично) и многокорпусные (несколько прочных корпусов внутри легкого). К последним относится отечественный подводный ракетный крейсер проекта 941 – самая большая атомная подлодка в мире. Внутри ее легкого корпуса находятся пять прочных корпусов, два из которых являются основными. Для изготовления прочных корпусов использовали титановые сплавы, а для легкого – стальной. Его покрывает нерезонансное противолокационное звукоизолирующее резиновое покрытие, весящее 800 тонн. Одно это покрытие весит больше, чем американская атомная подлодка NR-1. Проект 941 – воистину гигантская субмарина. Длина ее составляет 172, а ширина – 23 м. На борту несут службу 160 человек.
Можно видеть, насколько различаются атомные подлодки и сколь отличным является их «содержание». Теперь рассмотрим более наглядно несколько отечественных ПЛ: лодки проекта 971, 949А и 955. Всё это – мощные и современные субмарины, несущие службу на флоте РФ. Лодки принадлежат к трем разным типам АПЛ, о которых мы говорили выше:
Атомные подлодки делят по назначению:
· РПКСН (Ракетный подводный крейсер стратегического назначения). Будучи элементом ядерной триады, эти субмарины несут на борту баллистические ракеты с ядерными боеголовками. Главные цели таких кораблей – военные базы и города противника. В число РПКСН входит новая российская АПЛ 955 «Борей». В Америке этот тип субмарин называют SSBN (Ship Submarine Ballistic Nuclear): сюда относится самая мощная из таких ПЛ – лодка типа «Огайо». Чтобы вместить на борту весь смертоносный арсенал, РПКСН проектируют с учетом требований большого внутреннего объема. Их длина часто превышает 170 м – это заметно больше длины многоцелевых подлодок.

ЛАРК К-186 «Омск» пр.949А OSCAR-II с открытыми крышками пусковых установок ракетного комплекса «Гранит» Лодки проекта во Флоте имеют неофициальное название «Батон» — за форму корпуса и внушительность размеров.
· ПЛАТ (Подводная лодка атомная торпедная). Такие лодки еще называют многоцелевыми. Их предназначение: уничтожение кораблей, других подлодок, тактических целей на земле и сбор разведданных. Они меньше РПКСН и имеют лучшую скорость и подвижность. ПЛАТ могут использовать торпеды или высокоточные крылатые ракеты. К числу таких АПЛ относятся американский «Лос-Анджелес» или советский/российский МПЛАТРК проекта 971 «Щука-Б».

Подводная лодка проекта 941 «Акула»
Американский «Сивулф» считается самой совершенной многоцелевой атомной подводной лодкой. Ее главная особенность – высочайший уровень скрытности и смертоносное вооружение на борту. Одна такая субмарина несет до 50 ракет «Гарпун» или «Томагавк». Также имеются торпеды. Из-за большой дороговизны флот США получил только три таких подлодки.


Подводная лодка проекта 941 «Акула»
· ПЛАРК (Подводная лодка атомная с ракетами крылатыми). Это самая малочисленная группа современных АПЛ. Сюда входят российский 949А «Антей» и некоторые переоборудованные в носители крылатых ракет американские «Огайо». Концепция ПЛАРК перекликается с многоцелевыми АПЛ. Субмарины типа ПЛАРК, правда, крупней – они представляют собой большие плавучие подводные платформы с высокоточным оружием. В советском/российском флоте эти лодки также именуют «убийцами авианосцев».

Внутри подводной лодки
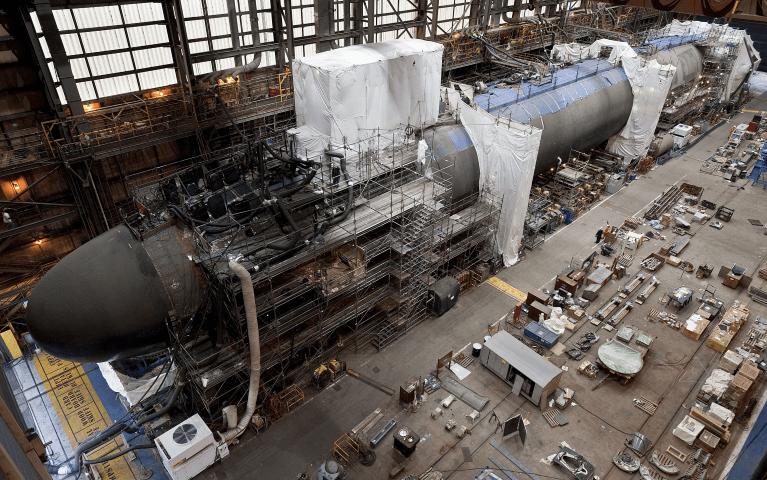
Детально рассмотреть конструкцию всех основных типов АПЛ сложно, но проанализировать схему одной из таких лодок вполне возможно. Ею станет субмарина проекта 949А «Антей», знаковая (во всех смыслах) для отечественного флота. Для повышения живучести создатели продублировали многие важные компоненты этой АПЛ. Такие лодки получили по паре реакторов, турбин и винтов. Выход из строя одного из них, согласно задумке, не должен стать для лодки смертельным. Отсеки субмарины разделяют межотсечные переборки: они рассчитаны на давление в 10 атмосфер и сообщаются люками, которые можно герметизировать, если это необходимо. Не все отечественные атомные субмарины имеют так много отсеков. Многоцелевая АПЛ проекта 971, например, разделена на шесть отсеков, а новый РПКСН проекта 955 – на восемь.

Подводная лодка «Курск»
Именно к лодкам проекта 949А относится печально известный «Курск». Эта субмарина погибла в Баренцевом море 12 августа 2000 года. Жертвами катастрофы стали все 118 членов экипажа, находившиеся на ее борту. Выдвигалось много версий происшедшего: самой вероятной из всех является взрыв хранившейся в первом отсеке торпеды калибра 650 мм. Согласно официальной версии, трагедия произошла из-за утечки компонента топлива торпеды, а именно пероксида водорода.
АПЛ проекта 949А имеет весьма совершенную (по меркам 80-х) аппарату, включающую гидроакустическую систему МГК-540 «Скат-3» и множество других систем. Лодка также оснащена автоматизированной, имеющей повышенную точность, увеличенный радиус действия и большой объем обрабатываемой информации навигационным комплексом «Симфония-У». Большая часть информации обо всех этих комплексах держится в тайне.
Отсеки АПЛ проекта 949А «Антей»:
Первый отсек:
Его еще называют носовым или торпедным. Именно здесь расположены торпедные аппараты. Лодка имеет два торпедных аппарата 650-мм и четыре 533-мм, а всего на борту АПЛ находится 28 торпед. Первый отсек состоит из трех палуб. Боевой запас хранится на предназначенных для этого стеллажах, а торпеды подаются в аппарат с помощью специального механизма. Здесь также находятся аккумуляторные батареи, которые в целях безопасности отделены от торпед специальными настилами. В первом отсеке обычно служат пять членов экипажа.

Второй отсек:
Этот отсек на субмаринах проектов 949А и 955 (и не только на них) исполняет роль «мозга лодки». Именно здесь расположен центральный пульт управления, и именно отсюда производится управление субмариной. Здесь находятся пульты гидроакустических систем, регуляторы микроклимата и навигационное спутниковое оборудование. Служат в отсеке 30 членов экипажа. Из него можно попасть в рубку АПЛ, предназначенную для наблюдения за поверхностью моря. Там же находятся выдвижные устройства: перископы, антенны и радары.

АПЛ проекта 955
Третий отсек:
Третьим является радиоэлектронный отсек. Здесь, в частности, находятся многопрофильные антенны связи и множество других систем. Аппаратура этого отсека позволяет принимать целеуказания, в том числе из космоса. После обработки полученная информация вводится в корабельную боевую информационно-управляющую систему. Добавим, что подводная лодка редко выходит на связь, чтобы не быть демаскированной.
Четвертый отсек:
Данный отсек – жилой. Тут экипаж не только спит, но и проводит свободное время. Имеются сауна, спортзал, душевые и общее помещение для совместного отдыха. В отсеке есть комната, позволяющая снять эмоциональную нагрузку – для этого, например, есть аквариум с рыбками. Кроме этого, в четвертом отсеке расположен камбуз, или, говоря простым языком, кухня АПЛ.

АПЛ с крылатыми ракетами. Проект 670 «Скат» (Charlie-I class)
Пятый отсек:
Здесь находится вырабатывающий энергию дизель-генератор. Тут же можно видеть электролизную установку для регенерации воздуха, компрессоры высокого давления, щит берегового питания, запасы дизтоплива и масла.
5-бис:
Это помещение нужно для деконтаминации членов экипажа, которые работали в отсеке с реакторами. Речь идет об удалении радиоактивных веществ с поверхностей и снижении уровня загрязнения радиоактивными веществами. Из-за того, что пятых отсека два, нередко происходит путаница: одни источники утверждают, что на АПЛ десять отсеков, другие говорят о девяти. Даже несмотря на то, что последним отсеком является девятый, всего на АПЛ (с учетом 5-бис) их имеется десять.
Шестой отсек:
Это отсек, можно сказать, находится в самом центре АПЛ. Он имеет особую важность, ведь именно здесь находятся два ядерных реактора ОК-650В мощностью по 190 МВт. Реактор относится к серии ОК-650 – это серия водо-водяных ядерных реакторов на тепловых нейтронах. Роль ядерного топлива исполняет высокообогащенная по 235-у изотопу двуокись урана. Отсек имеет объем 641 м³. Над реактором находятся два коридора, позволяющие попасть в другие части АПЛ.
Седьмой отсек:
Его также называют турбинным. Объем этого отсека составляет 1116 м³. Это помещение предназначено для главного распределительного щита; электростанции; пульта аварийного управления главной энергетической установкой; а также ряда других устройств, обеспечивающих движение подводной лодки.
Восьмой отсек:
Данный отсек очень похож на седьмой, и его тоже называют турбинным. Объем составляет 1072 м³. Здесь можно видеть электростанцию; турбины, которые приводят в движение винты АПЛ; турбогенератор, обеспечивающий лодку электроэнергией, и водоопреснительные установки.
Девятый отсек:
Это чрезвычайно малый отсек-убежище, объемом 542 м³, имеющий аварийный люк. Данный отсек в теории позволит выжить членам экипажа в случае катастрофы. Здесь есть шесть надувных плотов (каждый рассчитан на 20 человек), 120 противогазов и спасательные комплекты для индивидуального всплытия. Кроме этого, в отсеке расположены: гидравлика рулевой системы; компрессор воздуха высокого давления; станция управления электродвигателями; токарный станок; боевой пост резервного управления рулями; душевая и запас продуктов на шесть дней.
Вооружение
Отдельно рассмотрим вооружение АПЛ проекта 949А. Кроме торпед (о которых мы уже говорили) лодка несет 24 крылатые противокорабельные ракеты П-700 «Гранит». Это ракеты дальнего действия, которые могут пролететь по комбинированной траектории до 625 км. Для наведения на цель П-700 имеет активную радиолокационную головку наведения.

Ракета П-700 Гранит
Ракеты находятся в специальных контейнерах между легкими и прочными корпусами АПЛ. Их расположение примерно соответствует центральным отсекам лодки: контейнеры с ракетами идут по обе стороны субмарины, по 12 на каждой из сторон. Все они повернуты вперед от вертикали на угол 40-45°. Каждый из таких контейнеров имеет специальную крышку, выдвигающуюся при ракетном запуске.
Крылатые ракеты П-700 «Гранит» – основа арсенала лодки проекта 949А. Между тем реального опыта по применению этих ракет в бою нет, так что о боевой эффективности комплекса судить сложно. Испытания показали, что из-за скорости ракеты (1,5-2,5 М) перехватить ее очень тяжело. Однако не все так однозначно. Над сушей ракета не способна лететь на малой высоте, и поэтому представляет собой легкую мишень для средств противовоздушной обороны противника. На море показатели эффективности выше, но, стоит сказать, что американское авианосное соединение (а именно для борьбы с ними создавалась ракета) имеет отличное прикрытие ПВО.
Подобная компоновка вооружения не характерна для атомных субмарин. На американской лодке «Огайо», например, баллистические или крылатые ракеты располагаются в шахтах, идущих в два продольных ряда за ограждением выдвижных устройств. А вот многоцелевой «Сивулф» запускает крылатые ракеты из торпедных аппаратов. Точно так же запускаются крылатые ракеты с борта отечественной МПЛАТРК проекта 971 «Щука-Б». Конечно, все эти субмарины несут и различные торпеды. Последние используются для поражения подлодок и надводных кораблей.
Нашли опечатку? Выделите фрагмент и нажмите Ctrl + Enter.
Скопировать ссылку
Как устроена атомная подлодка (10 фото)
Бесшумные «хищники» морских глубин всегда наводили ужас на неприятеля, причем как в военное, так и в мирное время. С подлодками связано бесчисленное количество мифов, что, впрочем, неудивительно, если учесть, что их создают в условиях особой секретности. Экскурс в устройство атомных подводных лодок предложен вашему вниманию в этой фишке.
Принцип действия субмарины
Система погружения и всплытия подводной лодки включает в себя балластные и вспомогательные цистерны, а также соединительные трубопроводы и арматуру. Основной элемент здесь – это цистерны главного балласта, за счет заполнения водой которых погашается основной запас плавучести ПЛ. Все цистерны входят в носовую, кормовую и среднюю группы. Их можно заполнять и продувать по очереди или одновременно.
У подлодки есть дифферентные цистерны, необходимые для компенсации продольного смещения грузов. Балласт между дифферентными цистернами передувается при помощи сжатого воздуха или же перекачивается с помощью специальных помп. Дифферентовка – именно так называется прием, целью которого является «уравновешивание» погруженной ПЛ.
Атомные подлодки делят на поколения. Для первого (50-е) характерна относительно высокая шумность и несовершенство гидроакустических систем. Второе поколение строили в 60-е – 70-е годы: форма корпуса была оптимизирована, чтобы увеличить скорость. Лодки третьего больше, на них также появилось оборудование для радиоэлектронной борьбы. Для АПЛ четвертого поколения характерны беспрецедентно малый уровень шума и продвинутая электроника. Облик лодок пятого поколения прорабатывается в наши дни.
Важный компонент любой субмарины – воздушная система. Погружение, всплытие, удаление отходов – все это делается при помощи сжатого воздуха. Последний хранят под высоким давлением на борту ПЛ: так он занимает меньше места и позволяет аккумулировать больше энергии. Воздух высокого давления находится в специальных баллонах: как правило, за его количеством следит старший механик. Пополняются запасы сжатого воздуха при всплытии. Это долгая и трудоемкая процедура, требующая особого внимания. Чтобы экипажу лодки было чем дышать, на борту субмарины размещены установки регенерации воздуха, позволяющие получать кислород из забортной воды.
АПЛ: какие они бывают
Атомная лодка имеет ядерную силовую установку (откуда, собственно, и пошло название). В наше время многие страны также эксплуатируют дизель-электрические подлодки (ПЛ). Уровень автономности атомных субмарин намного выше, и они могут выполнять более широкий круг задач. Американцы и англичане вообще прекратили использовать неатомные подлодки, российский же подводный флот имеет смешанный состав. Вообще, только пять стран имеют атомные подлодки. Кроме США и РФ в «клуб избранных» входят Франция, Англия и Китай. Остальные морские державы используют дизель-электрические субмарины.
Будущее российского подводного флота связано с двумя новыми атомными субмаринами. Речь идет о многоцелевых лодках проекта 885 «Ясень» и ракетных подводных крейсерах стратегического назначения 955 «Борей». Лодок проекта 885 построят восемь единиц, а число «Бореев» достигнет семи. Российский подводный флот нельзя будет сравнить с американским (США будут иметь десятки новых субмарин), но он будет занимать вторую строчку мирового рейтинга.
Русские и американские лодки отличаются по своей архитектуре. США делают свои АПЛ однокорпусными (корпус и противостоит давлению, и имеет обтекаемую форму), а Россия – двухкорпусными: в этом случае есть внутренний грубый прочный корпус и внешний обтекаемый легкий. На атомных подлодках проекта 949А «Антей», к числу которых относился и печально известный «Курск», расстояние между корпусами составляет 3,5 м. Считается, что двухкорпусные лодки более живучи, в то время как однокорпусные при прочих равных имеют меньший вес. У однокорпусных лодок цистерны главного балласта, обеспечивающие всплытие и погружение, находятся внутри прочного корпуса, а у двухкорпусных – внутри легкого внешнего. Каждая отечественная субмарина должна выжить, если любой отсек будет полностью затоплен водой – это одно из главных требований для подлодок.
В целом, наблюдается тенденция к переходу на однокорпусные АПЛ, так как новейшая сталь, из которой выполнены корпуса американских лодок, позволяет выдерживать колоссальные нагрузки на глубине и обеспечивает субмарине высокий уровень живучести. Речь, в частности, идет о высокопрочной стали марки HY-80/100 с пределом текучести 56-84 кгс/мм. Очевидно, в будущем применят еще более совершенные материалы.
Существуют также лодки с корпусом смешанного типа (когда легкий корпус перекрывает основной лишь частично) и многокорпусные (несколько прочных корпусов внутри легкого). К последним относится отечественный подводный ракетный крейсер проекта 941 – самая большая атомная подлодка в мире. Внутри ее легкого корпуса находятся пять прочных корпусов, два из которых являются основными. Для изготовления прочных корпусов использовали титановые сплавы, а для легкого – стальной. Его покрывает нерезонансное противолокационное звукоизолирующее резиновое покрытие, весящее 800 тонн. Одно это покрытие весит больше, чем американская атомная подлодка NR-1. Проект 941 – воистину гигантская субмарина. Длина ее составляет 172, а ширина – 23 м. На борту несут службу 160 человек.
Можно видеть, насколько различаются атомные подлодки и сколь отличным является их «содержание». Теперь рассмотрим более наглядно несколько отечественных ПЛ: лодки проекта 971, 949А и 955. Всё это – мощные и современные субмарины, несущие службу на флоте РФ. Лодки принадлежат к трем разным типам АПЛ, о которых мы говорили выше:
Атомные подлодки делят по назначению:
· РПКСН (Ракетный подводный крейсер стратегического назначения). Будучи элементом ядерной триады, эти субмарины несут на борту баллистические ракеты с ядерными боеголовками. Главные цели таких кораблей – военные базы и города противника. В число РПКСН входит новая российская АПЛ 955 «Борей». В Америке этот тип субмарин называют SSBN (Ship Submarine Ballistic Nuclear): сюда относится самая мощная из таких ПЛ – лодка типа «Огайо». Чтобы вместить на борту весь смертоносный арсенал, РПКСН проектируют с учетом требований большого внутреннего объема. Их длина часто превышает 170 м – это заметно больше длины многоцелевых подлодок.
ЛАРК К-186 «Омск» пр.949А OSCAR-II с открытыми крышками пусковых установок ракетного комплекса «Гранит» Лодки проекта во Флоте имеют неофициальное название «Батон» — за форму корпуса и внушительность размеров.
· ПЛАТ (Подводная лодка атомная торпедная). Такие лодки еще называют многоцелевыми. Их предназначение: уничтожение кораблей, других подлодок, тактических целей на земле и сбор разведданных. Они меньше РПКСН и имеют лучшую скорость и подвижность. ПЛАТ могут использовать торпеды или высокоточные крылатые ракеты. К числу таких АПЛ относятся американский «Лос-Анджелес» или советский/российский МПЛАТРК проекта 971 «Щука-Б».
Подводная лодка проекта 941 «Акула»
Подводная лодка проекта 941 «Акула»
· ПЛАРК (Подводная лодка атомная с ракетами крылатыми). Это самая малочисленная группа современных АПЛ. Сюда входят российский 949А «Антей» и некоторые переоборудованные в носители крылатых ракет американские «Огайо». Концепция ПЛАРК перекликается с многоцелевыми АПЛ. Субмарины типа ПЛАРК, правда, крупней – они представляют собой большие плавучие подводные платформы с высокоточным оружием. В советском/российском флоте эти лодки также именуют «убийцами авианосцев».
описание, характеристики и принцип работы
Подводными лодками называют класс кораблей, которые способны двигаться и выполнять другие действия полностью автономно под водой и на ее поверхности. Такие судна способны нести вооружение, а также могут быть приспособлены для различных специализированных операций. Рассмотрим, как устроена подводная лодка и как она работает.
Исторические факты
Самая первая информация о подобных плавательных средствах датируется 1190 годом. В одном из германских сказаний главный персонаж построил нечто вроде подводной лодки из кожи и сумел скрыться на ней от судов врага на морском дне. Это плавательное средство пробыло на дне 14 дней. Воздух внутрь подавался через трубку, второй конец которой был на поверхности. Каких-либо подробностей, чертежей, информации, как устроена подводная лодка, не сохранилось.
Более-менее реальные основы подводного плавания изложил Уильям Буэн в своем труде в 1578 году. Буэн на базе закона Архимеда впервые научно обосновывает способы всплытия и погружения при помощи изменения характеристик плавучести судна, изменяя его водоизмещение. По этим трудам удалось построить судно, способное погружаться и всплывать. Плыть под водой судно не могло.
Далее, в эпоху научно-технического прогресса, в Санкт-Петербурге тайным образом инженеры заложили принцип устройства подводной лодки, предназначенной для вооруженных сил. Она строилась по проектам Ефима Никонова. Проект осуществлялся с 1718 по 1721 год. Далее прототип спустили на воду, и он смог успешно пройти все испытания.
Через 50 лет в США построили первую подводную лодку, которая использовалась в ведении боевых действий. Корпус имел форму чечевицы из двух половинок, которые соединялись при помощи фланцев и кожаных вставок. На крыше была устроена полусфера из меди с люком. На лодке было балластное отделение, которое опорожнялось и заполнялось при помощи помпы. Имелся и аварийный балласт из свинца.
Первой серийной подводной лодкой стало судно Джевецкого. Серия составляла 50 штук. Затем конструкция была усовершенствована, и вместо весельного привода появился вначале пневматический, а затем и электропривод. Эти конструкции строили с 1882 по 1888 год.
Первой электрической субмариной стало судно разработки Клода Губэ. Прототип спустили на воду в 1888 году, судно имело водоизмещение в размере 31 тонны. Для передвижения использовался электрический двигатель мощностью 50 лошадиных сил. Питание осуществлялось от 9-тонной аккумуляторной батареи.
В 1900 году французские инженеры создали первую лодку с паровым и электрическим двигателем. Первый предназначался для движения над водой, второй – под ней. Конструкция была уникальна. Американское судно по подобию разработки французов работало на бензиновом двигателе для плавания над поверхностью воды.
Устройство подводной лодки
Этому вопросу нужно уделить особое внимание. Давайте рассмотрим, как устроена подводная лодка. Она состоит из нескольких конструктивных элементов, выполняющих самые разные функции. Рассмотрим основные элементы.

Корпус
Главная задача корпуса – это полностью обеспечить постоянную внутреннюю среду для механизмов судна и для его экипажа в процессе погружения. Также корпус должен быть таким, чтобы достигалась максимально возможная скорость движения под водой. Это обеспечивается облегченным корпусом.
Типы корпусов
Подводные лодки, где корпус выполняет две эти задачи, называли однокорпусными. Цистерна главного балласта находилась внутри корпуса, что снижало полезный объем внутри и требовало максимальной прочности стенок. Лодка подобной конструкции выигрывает в весе, в необходимой мощности двигателя и в характеристиках маневренности.
Подводные лодки с полуторным корпусом оснащены прочным корпусом, который частично закрыт более легким. Цистерну главного балласта здесь вынесли наружу. Она находится между двумя корпусами. Среди плюсов – отличная маневренность и быстрая скорость погружения. Минусы – мало места внутри, малое время автономной работы.

Классические двухкорпусные лодки оснащаются прочным корпусом, который на всей своей протяженности закрыт легким корпусом. Главный балласт находится в промежутке между корпусами. Лодка обладает большой надежностью, временем автономной работы, большим внутренним объемом. Среди минусов – длительный процесс погружения, крупные размеры, сложность систем заполнения балластных цистерн.
Современные подходы к строительству подводных лодок диктуют оптимальные формы корпусов. Эволюция формы очень тесно связана с развитием систем двигателей. Изначально в приоритете были лодки для надводного перемещения с возможностью кратковременного погружения для решения боевых задач. Корпус тех субмарин имел классическую форму с заостренной носовой частью. Гидродинамическое сопротивление было очень высоким, но тогда оно не играло особой роли.
Современные лодки имеют значительно большую автономность и скорость хода, поэтому инженерам приходится снижать его – корпус делают в форме капли. Это оптимальная форма для движения под водой.
Моторы и АКБ
В устройстве современной подводной лодки для движения имеются аккумуляторы, электродвигатели и дизельные генераторы. Одного заряда аккумуляторов часто недостаточно. Максимум, на что хватает заряда – до четырех суток. На максимальной скорости АКБ подводной лодки разряжается за несколько часов. Подзарядку осуществляют дизельным генератором. Лодка обязательно должна всплывать, чтобы аккумуляторы зарядились.
Также в устройстве дизельной подводной лодки применялись анаэробные или воздухонезависимые двигатели. Им не нужен воздух. Лодка могла не всплывать.
Системы для погружения и всплытия
В устройстве подводной лодки имеются и эти системы. Для погружения подводная лодка, в отличие от надводной, должна иметь отрицательную плавучесть. Этого достигали двумя способами – повышением веса или снижением водоизмещения. Для повышения веса в подводных лодках имеются балластные цистерны, которые заполняются водой либо воздухом.

Для обычного всплытия или погружения лодки применяют кормовые, а также носовые цистерны или цистерны главного балласта. Они нужны для заполнения водой в целях погружения и для заполнения воздухом для всплытия. Когда лодка находится под водой, цистерны заполнены.
Чтобы быстро и точно контролировать глубину, применяют цистерны с контролем глубины. Взгляните на фото устройства подводной лодки. Через изменение объема воды контролируют изменение глубины.

Чтобы управлять направлением лодки, применяются вертикальные рули. На современных машинах рули могут достигать огромных размеров.
Системы наблюдения
Одни из первых субмарин для небольшой глубины управлялись через иллюминаторы. Далее, по мере развития, встал вопрос об уверенной навигации и управлении. Впервые для этого в 1900 году применили перископ. В дальнейшем системы постоянно модернизировались. Сейчас перископы уже никто не использует, а их место заняли гидроакустические активные и пассивные сонары.
Лодка внутри
Внутри подводная лодка представляет собой несколько отсеков. Если рассмотреть, как устроена подводная лодка на примере одного из экспонатов выставки «Из истории подводного флота России», то сразу же в первом отсеке можно видеть шесть носовых торпедных аппаратов, устройство для стрельбы, запасные торпеды.
Во втором отсеке находятся офицерские и командирские каюты, рубка специалиста по гидроакустике и комната радиоразведчика.

Третий отсек представляет собой центральный пост. В данном отсеке масса различных приборов и устройств для управления движением, погружением, всплытием.
Четвертый представляет собой кают-компании для старшин, камбуз, радиорубку. В пятом отсеке находятся три дизельных двигателя мощностью 1900 л. с. каждый. Они работают, когда лодка находится над водой. В следующем отсеке находятся три электрических двигателя для подводного хода.
В седьмом установлены торпедные аппараты, прибор для стрельбы, койки личного состава. Можно посмотреть, как устроена подводная лодка внутри. Фото позволит ознакомиться со всеми приборами и отсеками.
Устройство подводной лодки
Подводная лодка британского военно-морского флота «Апхоулдер» («Союзник»)
Подводные лодки безо всякого труда плавают по водной поверхности. Но в отличие от всех остальных кораблей могут опускаться на дно океана и в некоторых случаях месяцами плавать в его глубинах. Весь секрет в том, что подлодка имеет уникальную двухкорпусную конструкцию.
Между ее внешним и внутренним корпусами находятся специальные отделения, или балластные цистерны, которые могут заполняться морской водой. При этом увеличивается полный вес подлодки и соответственно уменьшается ее плавучесть, то есть способность держаться на поверхности. Вперед лодка движется за счет работы гребного винта, а погрузиться ей помогают горизонтальные рули, названные гидропланами.
Внутренний стальной корпус подлодки рассчитан на то, чтобы выдерживать огромное давление воды, которое растет с глубиной. В погруженном состоянии держаться устойчиво кораблю помогают дифферентные цистерны, расположенные вдоль киля. Если надо всплывать, то на подлодке освобождают от воды, или, как говорят, продувают балластные цистерны. Подлодке помогают идти нужным курсом такие навигационные средства, как перископы, радар, (радиолокатор), сонар (гидролокатор) и спутниковые системы связи.
На изображении сверху, показанная в разрезе ударная британская подлодка водоизмещением 2455 тонн и длиной 232 фута может двигаться со скоростью 20 миль в час. Пока лодка находится у поверхности, ее дизельные двигатели вырабатывают электроэнергию. Эта энергия запасается в аккумуляторных батареях и расходуется затем в подводном плавании. Атомные подводные лодки используют ядерное топливо, чтобы превратить воду в перегретый пар для работы ее паровых турбин.
Как погружается и всплывает подлодка?
Когда подлодка находится на поверхности, говорят, что она пребывает в состоянии положительной плавучести. Тогда ее балластные цистерны в основном заполнены воздухом (ближний рисунок справа). При погружении (средний рисунок справа) судно приобретает отрицательную плавучесть, так как воздух из балластных цистерн выходит через выпускные клапаны, и емкости заполняются водой через водозаборные порты. Чтобы двигаться на определенной глубине в погруженном состоянии, на подлодках используют технику уравновешивания, когда сжатый воздух нагнетается в балластные цистерны, а водозаборные порты остаются открытыми. При этом и наступает нужное состояние нейтральной плавучести. Для всплытия (дальний рисунок справа)с помощью сжатого воздуха, хранящегося на борту, выталкивают воду из балластных цистерн.
На подлодке мало свободного места. На верхнем рисунке моряки едят в кают-компании. В правом верхнем углу — американская подлодка в надводном плавании. Справа на фотографии — тесный кубрик, где спят подводники.
Чистый воздух под водой
На большинстве современных подлодок пресную воду делают из морской. И запасы свежего воздуха также делают на борту — разлагая пресную воду с помощью электролиза и освобождая из нее кислород. Когда подлодка курсирует вблизи поверхности, она с помощью прикрытых колпаками шноркелей — приспособлений, выставленных над водой, забирает свежий и выбрасывает отработанный воздух. В этом положении над боевой рубкой лодки оказываются на воздухе, кроме шноркелей, перископ, антенна радиосвязи и другие надстроечные элементы. Качество воздуха на подлодке контролируется ежедневно, чтобы обеспечивать нужное содержание кислорода. Весь воздух проходит через скруббер, или газоочиститель, для устранения загрязнений. Отработавшие газы выходят через отдельный трубопровод.
Торпедный аппарат — Global wiki. Wargaming.net
 Торпедный аппарат — устройство для стрельбы и хранения торпед. Позволяют производить предварительное наведение и стрельбу торпедами, ракетами, а так же постановку мин. Различаются способом пуска, числом заряжаемых торпед, способом их крепления и калибром. На подводных лодках так же используются как аварийное средство эвакуации экипажа.
Торпедный аппарат — устройство для стрельбы и хранения торпед. Позволяют производить предварительное наведение и стрельбу торпедами, ракетами, а так же постановку мин. Различаются способом пуска, числом заряжаемых торпед, способом их крепления и калибром. На подводных лодках так же используются как аварийное средство эвакуации экипажа. 
 Пуск торпеды Mark 32
Пуск торпеды Mark 32Первые пусковые торпедные установки
В 1866 году во время испытаний первых образцов своих торпед Роберт Уайтхед (англ. Robert Whitehead) использовал максимально упрощенную пусковую установку, которая представляла из себя наклонный желоб, в который устанавливалась торпеда и после пуска двигателя происходил ее сброс в воду. Такая конструкция могла быть использована во время испытаний и экспериментов, но была слишком ненадежна для применения в боевых условиях. Поэтому Уайтхед параллельно с работами над самой торпедой был вынужден заниматься разработкой торпедных пусковых устройств. В 1870 году, во время демонстрации своих торпед в Великобритании, Уайтхед оснастил колесный пароход Oberon тремя типами пусковых установок: одним рамочным и двумя трубными, для подводного и надводного пусков. Рамочная пусковая установка представляла из себя пространственную конструкцию, к которой подвешивалась торпеда. Для пуска освобождались замки крепления торпеды, которая погружалась в воду и с помощью фала происходил запуск двигателя. Трубные пусковые установки были спроектированы на основе систем пневматического сброса морских мин. Они представляли собой трубы, снабженные передней и задней крышками и курковым зацепом. Торпеда перед пуском помещалась в трубу, в случае использования устройства для подводного пуска труба затапливалась забортной водой. Для пуска в казенную часть трубы подавался сжатый воздух, который выталкивал торпеду. Перед пуском было необходимо произвести раскрутку гироскопа торпеды, который обеспечивал курсовую устойчивость при автономном ходе.
В 1881 году американский изобретатель Джон Эрикссон (англ. John Ericsson), ранее сконструировавший метательную мину, разработал пороховое пусковое устройство. Благодаря использованию устройства Эрикссона безмоторная мина могла выбрасываться более чем на 250 метров по поверхности и на 40 метров в подводном положении. Помимо пороховых и воздушных пусковых устройств, были разработаны паровые и механические трубчатые устройства для пуска торпед.
К началу ХХ века установки для пуска торпед приобрели современный вид и их конструктивные особенности и принцип действия стали определяться параметрами самих торпед и особенностями несущих кораблей.
-

Торпедный аппарат Уайтхеда
Заряжание торпедного аппарата XIX века
-
Носовой торпедный порт USS Indiana
Один из ранних торпедных катеров

Основные конструкции торпедных аппаратов
Рамочный торпедный аппарат
Рамочные торпедные аппараты представляли собой простую пространственную конструкцию, в которой закреплялась торпеда. Одним из первых такую конструкцию использовал Роберт Уайтхед. Как правило, такими аппаратами оснащались малые торпедные катера, размеры которых не позволяли использовать более тяжелые конструкции. Рамочными аппаратами был оборудован первый английский миноносец HMS Lightning. Для пуска торпед рамочный аппарат с помощью балок опускался в воду, после чего производился запуск двигателя торпеды и освобождение фиксирующих торпеду замков. Такая конструкция позволяла производить запуск только из неподвижного положения корабля или при движении самым малым ходом, что в значительной мере ограничивало боевые характеристики. С появлением легких бугельных, желобных и трубных пусковых установок рамочные торпедные аппараты полностью вышли из применения.
-
Катер Avernus с рамочными торпедными аппаратами
-
Торпедный аппарат Торникрофта на HMS Lightning


Желобный торпедный аппарат
Желобные торпедные аппараты наряду с рамочными стали одними из первых устройств для пуска самодвижущихся торпед. Аппараты такого типа чаще всего использовались на торпедных катерах и размещались в кормовой части корпуса. Появление желобных аппаратов было связано с ростом скорости торпедных катеров и миноносцев. Таранный миноносец HMS Polyphemus мог развивать скорость до 18 узлов, поэтому при пуске относительно тихоходной торпеды из носового аппарата было необходимо снизить скорость, чтобы дать возможность торпеде отойти на безопасное расстояние. Чтобы избежать нежелательного контакта с запущенной с носовой части корабля торпеды, надо было запускать торпеды либо с борта, либо с кормы. Пуск с кормы осуществлялся желобным торпедным аппаратом. Конструктивно такой аппарат представлял из себя желоб, усиленный с помощью ферм и размещенный внутри корпуса корабля. В носовой части желоба устанавливался специальный толкатель, соединенный с пороховой каморой. Торпеда закреплялась в аппарате с помощью бугеля, который удерживал корпус торпеды по центру тяжести. Фиксация торпеды так же осуществлялась дополнительными стопорами, что позволяло избежать ее перемещения на ходу. При пуске торпеды замки стопоров и бугеля освобождали корпус торпеды, происходило воспламенение пороха, пороховые газы через толкатель выталкивали торпеду по желобу, запуск двигателя торпеды осуществлялся специальным фалом, выполнявшим роль замедлителя. После пуска торпеды катер должен был отвернуть с ее курса и торпеда, набрав заданную глубину и скорость, продолжала самостоятельное движение. Недостатком такой системы пуска являлась демаскировка катера за счет необходимости производить пуск на полном ходу. Несмотря на этот недостаток, желобные торпедные аппараты широко применялись на миноносцах Торникрофта и советских торпедных катерах Г-5 до окончания Второй мировой войны.
В 1936 году в Великобритании компанией British Power Boat были разработаны 60-футовые торпедные катера, в которых использовался безпороховой желобный торпедный аппарат. Торпеда в походном положении размещалась на желобе, перед стрельбой желоб опускался и при освобождении замков соскальзывала в воду под собственным весом по удлиненному транцу.
Пуск торпед с кормы также использовался на немецких легких торпедных катерах серии LS. Эти катера имели водоизмещение всего 11,5 т, поэтому установка обычных трубных аппаратов была невозможна. Торпедные аппараты на катерах LS предусматривали пуск со стороны кормы, но не по желобу, а по наклонной трубе.
-
Желобный торпедный аппарат катера MAS1
-
Желобный торпедный аппарат катера Г-5
-
Схема движения торпеды при пуске с кормы катера.
-
Заряжание желобного торпедного аппарата



Бугельный торпедный аппарат
Бугельный торпедный аппарат состоит из откидной платформы, на которой с помощью бугелей зафиксирована торпеда. Как правило, аппараты такого типа устанавливались вдоль бортов, реже — в кормовой части малых торпедных катеров. Для пуска платформа откидывалась через борт, после чего расцеплялись замки бугелей, происходил запуск двигателя и торпеда начинала автономный ход. Таким образом пуск торпеды мог осуществляться на любой скорости и катер мог производить залповую стрельбу с нескольких аппаратов одновременно. Наибольшее распространение бугельные аппараты получили на катерах итальянской постройки.
-
Крепление торпеды в бугельном торпедном аппарате
-
Торпедный катер MAS7 с бугельным торпедным аппаратом
-
Торпедный катер MAS20 с бугельным торпедным аппаратом
-
Торпедный катер MAS30 с бугельным торпедным аппаратом
-
Бугельный торпедный аппарат
-
Пуск торпеды Mk 13






Рамочный торпедный аппарат Джевецкого
Первые подводные лодки имели крайне ограниченные водоизмещение и размеры корпуса. Эти ограничения позволяли устанавливать на них лишь один-два торпедных аппарата, как на британских Holland, американской Plunger и немецкой SM U1. С появлением возможности строить подводные лодки увеличенных размеров торпедные аппараты стали устанавливаться как в носовой, так и кормовой оконечностях корпуса, однако запас торпед все равно оставался ограниченным. Чтобы увеличить его, некоторые конструкторы предлагали установку внешних торпедных аппаратов. Такое решение одновременно решало проблему увеличения числа торпед на борту и позволяло производить их пуск без трудоемкой процедуры перезарядки.
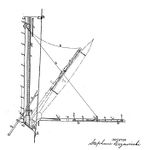
Один из вариантов внешних торпедных аппаратов стала конструкция польско-русского инженера и изобретателя Степана Карловича Джевецкого. Аппарат состоял из верхней и нижней балок, которые закреплялись в нише корпуса лодки. Балки соединялись друг с другом двумя разрезными бугелями. Торпеда опиралась на нижнюю балку и фиксировалась бугелями, верхний конец которых запирался штифтом. При подготовке к выстрелу шток пневмопривода освобождал штифты замков бугелей и торпеда отводилась от корпуса лодки на заданный с помощью специального рычага угол прицеливания. Удерживание осуществлялось специальным зажимом, который фиксировал хвостовую часть торпеды. Когда угол отваливания торпеды совпадал с углом прицеливания, хвостовой зажим освобождался, открывался кран подачи сжатого воздуха в двигатель торпеды и она начинала самостоятельное движение. Рамочные аппараты Джевецкого позволяли осуществлять пуск под углом до 20 градусов относительно курса подводной лодки, имели возможность применения веерной стрельбы, не имели демаскирующего лодку воздушного пузыря и отличались простотой и надежностью. В российском флоте аппараты Джевецкого были установлены на российских подводных лодках типов «Морж», «Барс», «Нарвал», французских Gustave Zede, Brumaire и доказали свою эффективность в боевых условиях, хотя по точности уступали трубным торпедным аппаратам. Однако с ростом глубины погружения аппараты такого типа оказались неэффективны. Корпуса торпед, постоянно контактировавшие с агрессивной морской водой, давали течи, торпеды выходили из строя и к концу Первой Мировой войны использование таких торпедных аппаратов было прекращено.
-
Подводная лодка Акула, вооруженная торпедным аппаратом Джевецкого
-
Подводная лодка Морж
-
Рамочный торпедный аппарат Джевецкого
-
Принцип работы аппарата Джевецкого
-
Аппарат Джевецкого на модели подводной лодки Gustave Zede
-
Рамочный торпедный аппарат Джевецкого





Трубные торпедные аппараты
Трубные торпедные аппараты надводного пуска
Трубный торпедный аппарат первоначально использовался для стрельбы как метательными, так и самоходными торпедами. С прекращением производства метательных торпед трубные аппараты стали наиболее распространенными устройствами для пуска торпед, устанавливаемыми на крупные корабли и подводные лодки.
Первые трубные торпедные аппараты имели неподвижную конструкцию. Они состояли из трубы, в которую помещалась торпеда, передней и задней крышки и пневматического, парового или порохового пускового устройства. Торпеда могла свободно скользить внутри трубы на бронзовых роликах, а когда торпеда полностью выходила из аппарата, срабатывал дистанционный запуск двигателя. Так как для пуска торпед, как правило, использовалась энергия расширяющихся газов, зазор между корпусом торпеды и трубой уплотнялся обтюраторами. Трубные аппараты могли производить пуск как ниже, так и выше поверхности воды. В случае подводного пуска перед выстрелом торпедный аппарат затапливался забортной водой через переднюю крышку, которая закрывалась после пуска, а вода из трубы продувалась сжатым воздухом. Загрузка торпед чаще всего производилась через заднюю крышку. Неподвижные торпедные аппараты подводного пуска были легко адаптированы для применения на подводных лодках. Для повышения точности некоторые торпедные аппараты снабжались направляющими балками, которые обеспечивали удерживание торпеды по курсу пуска.
На надводных кораблях достаточного водоизмещения на смену неподвижным трубным аппаратам довольно быстро пришли поворотные аппараты, которые позволяли производить пуск под углом к курсу корабля. Вскоре поворотные аппараты стали изготавливаться многоствольными, что позволяло производить залповые и веерные пуски торпед, что значительно повышало эффективность торпедного вооружения. Первыми стали использоваться сдвоенные торпедные аппараты. В 1915 году на российских эсминцах типа Орфей впервые были установлены строенные пусковые установки, а после Первой Мировой войны на многих крейсерах появились счетверенные установки, что позволило довести суммарный бортовой залп до 32 торпед, а у IJN Kitakami после его переоборудования в торпедный крейсер — до 40. Из за значительной массы и габаритов счетверенные аппараты имели ограниченный до 105 градусов угол поворота.
В 1935 году в состав британского флота был введен эсминец типа G HMS Glowworm, на котором были установлены пятитрубные торпедные аппараты. Такими же аппаратами оснащались последующие типы довоенных британских эсминцев, американские эсминцы типов Benson, Fletcher, Allen M. Sumner и японский супер-эсминец IJN Shimakaze.
-
Аппарат для стрельбы метательной торпедой
-
Трубный торпедный аппарат
-
Трубный торпедный аппарат на катере Д-3
-
Опорный подшипник поворотного торпедного аппарата
-
Трехтрубный торпедный аппарат




Наружные трубные торпедные аппараты подводных лодок
Для освобождения внутреннего пространства подводных лодок их оборудовали внешними трубными торпедными аппаратами. По своему устройству такие аппараты были полностью аналогичными внутренним и состояли из трубы, внутренний диаметр которой соответствовал калибру торпеды, передней и задней крышек а так же устройствами для продувки, затопления и пуска двигателя торпед. В отличии от бугельных и рамочных аппаратов, внешние трубные аппараты позволяли хранить торпеды в сухом состоянии. Внешние трубные торпедные аппараты устанавливались на USS Narwhal (SS-167), USS Nautilus (SS-168), британские подводные лодки типа Т, частично на лодки типа U, немецкие лодки типа VIIA.
Разновидностью внешних трубных аппаратов были поворотные пусковые установки, которые в походном положении были прижаты к корпусу лодки, а при необходимости пуска торпеды могли быть повернуты на произвольный угол. Такая конструкция позволяла производить пуск под произвольным углом к курсу лодки вплоть до перпендикулярного. Как правило, поворотные торпедные аппараты были спаренными и использовались на американских субмаринах AA-1, G-1 (USS Seal), голландских O19, O20, O24, KVII, KXV, польских Orzel и Wilk, французских Saphir, Redoutable и Surcouf.
-
Наружный торпедный аппарат на подводной лодке
-
-
Подводные лодки Type VIIA с наружными ТА
-
Британские подводные лодки типа T




Пятитрубные торпедные аппараты Mark 14 и Mark 15
Пятитрубные торпедные аппараты устанавливались на американские эсминцы типов Benson, Bristol, Fletcher и Allen M Sumner. Аппараты Mark 14 предназначались для установки в носовой части эсминцев, а Mark 15 в кормовой. Конструктивно обе модели были идентичны, но Mark 15 оборудовался стальным щитом, который защищал расчет 152-мм орудия, установленного рядом с торпедным аппаратом. Вес Mark 14 составлял 18,58 т, Mark 15 был на 472 кг тяжелее. Каждый аппарат состоял из пяти труб внутренним диаметром 533 мм, в которых на бронзовых роликах свободно перемещались торпеды. Аппарат имел электрогидравлический привод, но в случае его повреждения наведение могло производиться вручную. Механизм наведения и прицеливания находился на верхней части аппарата. Между командиром торпедного аппарата и наводчиком, находившимся на мостике, была организована телефонная связь. При необходимости расчет торпедного аппарата мог произвести прицеливание вручную.
Для заряжания использовался выдвижной кран, но досылание производилось вручную, так как торпеда внутри трубы скользила по роликам без значительных усилий. Несмотря на простоту перезарядки, экипажи американских эсминцев как правило не производили перезарядку в открытом море и тем более — во время боя. Установленная в аппарат торпеда фиксировалась передней и задней защелками, при этом задняя защелка была связана с задней крышкой трубы и одновременно служила блокиратором пуска торпедного двигателя. Установка глубины хода производилась для всех пяти торпед одновременно, а курсовые углы настройки гироскопов могли попарно и знакопеременно отличаться от углов установки центральной трубы, благодаря чему была реализована возможность автоматической установки углов для веерного пуска.
Каждая из труб имела метательный заряд пороха весом 1 кг. При подрыве пороха торпеда скользила на бронзовых роликах по внутренней поверхности трубы и на момент выхода из аппарата имела скорость 15 м/с. Запуск двигателя производился дистанционно, с помощью фала. Стандартный порядок пуска, позволявший избежать дополнительной нагрузки на аппарат за счет разбалансировки веса был следующим: левый боковой, правый боковой, левый центральный, правый центральный, центральный. Для использования аппаратов в случае отрицательной температуры воздуха они оборудовались устройствами обогрева.
Торпедные аппараты Mark 14 и Mark 15 управлялись с помощью двух директоров Mark 27. Они устанавливались на двух крыльях мостика, каждый директор обслуживался расчетом из 4 человек: офицера, дальномерщика, оператора и связиста.
-
Пятитрубный торпедный аппарат Mark 14
-
Схема заряжания и пуска торпедного аппарата Mark 14
-
USS Grayson (DD-435) с пятитрубными торпедными аппаратами
-
Директор наведения торпед на эсминце USS Bristol (DD-453)




Трубные торпедные аппараты подводного пуска
Несмотря на схожую конструкцию, устройство подводных и надводных трубных торпедных аппаратов имеет значительные отличия. Роберт Уайтхед построил первый подводный торпедный аппарат еще в 1866 году для испытаний по заказу австрийского флота и на протяжении значительного времени такие аппараты были наиболее востребованы для вооружения крупных кораблей. Применение надводных аппаратов на обычных кораблях несет определенную опасность, так как взрыв торпеды может иметь самые фатальные последствия, как это произошло с испанским броненосцем Vizcaya в Сантьяго 3 июля 1898 года. Подводные аппараты размещены ниже ватерлинии и защищены броней. Кроме того, пущенная под воду торпеда более устойчива и не подвергается удару о поверхность. Но несмотря на ряд преимуществ, аппараты подводного пуска имею и ряд недостатков, многие из которых были преодолены только во второй половине ХIХ века. Главной проблемой являлась необходимость обеспечить водонепроницаемость наружного порта аппарата. Как правило он представлял из себя откидную крышку, либо вертикальный или горизонтальный шлюз. В обычном положении порт герметично закрыт и открывался только в момент пуска торпеды. Запуск из кормовых и носовых аппаратов не имел проблем при прямолинейном движении корабля, но при интенсивном маневрировании, а также при запуске из бортового аппарата существовал риск повреждения торпеды. Чтобы избежать такого повреждения, аппараты снабжались направляющими балками или иными конструкциями, по которым скользил корпус торпеды в момент ее выхода из аппарата. В отличии от надводных аппаратов, создание многотрубных подводных аппаратов требовало установки единого герметичного торпедного порта, что снижало жесткость обшивки корпуса корабля.
Еще одной проблемой являлась необходимость откачки забортной воды после запуска торпеды. Французские и австрийские аппараты заряжались через заднюю крышку, немецкие и американские имели открывающийся сегмент в трубчатой части аппарата. Английские торпедные аппараты имели полностью раскрывающуюся трубку, в которую устанавливалась торпеда. Такая конструкция была наиболее неудачной, так как торпедный отсек постоянно заливался забортной водой.
В 1881 году в состав британского флота вошел таранный эсминец HMS Polyphemus, который предназначался для прорыва во вражеские порты. Это был уникальный по своим характеристикам и назначению корабль, который впервые был оснащен пятью подводными торпедными аппаратами, предназначенными для запуска торпед Whitehead Mark II. Хотя корабль был оборудован тараном, это было лишь уловкой, которая должна была ввести в заблуждение разведку стран-соперниц Великобритании за морское господство. Таран маскировал носовой торпедный аппарат, еще 4 аппарата было установлено в носовой части. Фактическое вооружение HMS Polyphemus было тщательно охраняемым секретом, так как его торпедные атаки должны были быть полностью неожиданными для противника.
-
Размещение торпедных аппаратов HMS Polyphemus
-
Размещение торпедных аппаратов HMS Polyphemus
-
Аппараты подводного пуска на переоборудованном траулере
-
Носовой торпедный аппарат барка USS Intrepid




Торпедные аппараты подводных лодок
Первоначально подводные лодки планировалось использовать как минные заградители. С появлением самодвижущихся торпед их установка на подводные лодки усилила роль подводного флота, а торпедноее вооружение на подводных лодках стало наиболее мощным оружием в ходе двух мировых войн, которое было способно решить исход не единственного сражения, а всей войны в целом.
Одними из первых подводных лодок, несущими торпедное вооружение, стали российские субмарины. Первое время они вооружались рамочными торпедными аппаратами Джевецкого. Такие аппараты имели как преимущества, так и недостатки. Разновидностью русских рамочных аппаратов были французские аппараты конструкции Жана Эрнеста Симоно(фр. Jean Ernest Simonot), которые также имели рамочную конструкцию, но для пуска торпеды использовался поршень с пневмоприводом. Такая конструкция позволяла производить пуск торпед под углом до 165 градусов относительно курса лодки и, в отличии от аппарата Джевецкого, пуск торпед мог быть произведен на ходу. Перед Второй мировой войной некоторые французские лодки были вооружены герметичными торпедными аппаратами Симоно, которые по конструкции соответствовали поворотным трубным аппаратам.
Британские подводные лодки типа Е, начиная с Е11, оборудовались торпедными аппаратами, которые позволяли производить пуск перпендикулярно курсу лодки. В походном положении торпеды располагались вдоль корпуса, для торпедного залпа они поворачивались перпендикулярно, после чего производился пуск торпед. Такая конструкция ослабляла силовую структуру лодки и нарушала расположение балластных цистерн, поэтому широкого распространения не получила. На подводных лодках типа К, проектируемых как подводные эсминцы, первоначально планировалось устанавливать на палубе поворотные трубные аппараты надводного пуска, но уже после первых испытаний эти аппараты были демонтированы.
Наиболее совершенные торпедные аппараты для подводных лодок были сконструированы в Германии. Они имели бронзовые трубы диаметром 553,6 мм и длиной 7,552 м, собранные из трех секторов. Трубы имели люки, через которые можно было произвести настройку гироскопов и приборов управления торпедой. Глубина хода и скорость устанавливались вручную, а курсовой угол для торпед систем FAT и LUT вводился с помощью сервоприводов. Загрузка торпед производилась вручную, лишь на лодка типа XXI появились механизированные системы заряжания аппаратов. Торпеда помещалась в трубу аппарата и фиксировалась стоп-болтами, которые срабатывали лишь в том случае, если корпус торпеды был расположен в правильном положении относительно люков управления гироскопами. Стоп-болты блокировали запуск двигателей торпеды и откидывались при подаче воздуха в пневматическую систему пуска, которая выталкивала торпеду из аппарата с начальной скоростью 10 м/с. В отличии от других конструкций, немецкие торпеды выталкивались поршнем, поэтому обтюрация корпуса не требовалась. Главным же преимуществом поршневой системы было отсутствие демаскирующих пузырьков воздуха во время пуска, именно поэтому немецкие подводные лодки провели наибольшее количество успешных атак, оставаясь незамеченными. После пуска торпеды поршень под давлением воды возвращался на место и аппарат мог быть перезаряжен. При пусках торпед с поверхности его возврат в исходное положение осуществлялся подачей сжатого воздуха в трубу торпедного аппарата. Внешняя крышка аппаратов имела защитные шлюзы и фиксировалась специальными замками. Основным недостатком немецких торпедных аппаратов была невозможность пусков с большой глубины и уязвимая конструкция, которая часто выходила из строя при разрывах глубинных бомб.
При использовании торпед с электромотором типа G7e торпедные аппараты оборудовались системой подогрева, повышавшей температуру батарей перед пуском до 30 градусов Цельсия, что обеспечивало их максимальную производительность.
-
Торпедный отсек британской подводной лодки HMS Holland
-
Загрузка торпеды в бортовой торпедный аппарат
-
Поворотный торпедный аппарат подводных лодок типа Е
-
Внутренняя поверхность трубы торпедного аппарата подводной лодки U995 типа VII
-
Поршень торпедного аппарата подводной лодки U505





Авиационные системы сброса торпед
Основной проблемой при сбросе торпед с воздуха являлась необходимость выполнять эту операцию на минимальной скорости, крайне низкой высоте (3-6 метров) и на дистанции 1400—1800 м от цели, что делало самолет-торпедоносец крайне уязвимым. Первый успешный сброс торпеды с борта воздушного судна был проведен 28 июля 1914 года с гидросамолета Calshot. Уже через год стартовавшие с гидроавиатранспорта HMS Ben-my-Chree гидросамолеты затопили 3 турецких корабля в Дарданеллах.
В начале 1920-х годов, ушедший в отставку лейтенант австралийских ВВС Фредерик Бернард Фаулер основал компанию Eastbourne Aviation Company, которая получила контракт на обучение пилотов палубных самолетов японского императорского флота. В группы по обучению входили как летчики-истребители, так и пилоты торпедоносцев. Японцы быстро пришли к выводу, что в качестве торпедоносцев нужно использовать специально разработанные самолеты, а не адаптировать для этой цели истребители и бомбардировщики. Для сброса были доработаны и торпеды, что позволило создать лучшую в годы Второй мировой войны связку из торпедоносца Nakajima B5n и авиационной торпеды Type 91. Сброс торпед был возможен на скоростях до 300 км/ч (позднее до 560 км/ч) с высоты до 60 м, что значительно превосходило аналогичные показатели торпедоносцев других стран.
-
Торпедоносец Fairey Swordfish
-
Подвес торпед на Heinkel He-111
-
Nakajima B5n с торпедой Type 91
-
Реплика Nakajima B5n




Литература и источники информации
- Branfill-Cook Roger Torpedo: The Complete History of the World’s Most Revolutionary Naval Weapon. — Barnsley, England: Seaforth Publishing, 2014. — 256 с. — ISBN 9781848322158
- А.Е. Тарас История подводных лодок 1624—1904. — Москва: ACT, 2002. — 240 с. — (Библиотека военной истории). — ISBN 5-1 7-007307-0
- А.Е. Тарас Торпедой — пли! История малых торпедных кораблей. — Минск: Харвест, 1999. — 368 с. — (Библиотека военной истории). — 11000 экз. — ISBN 985-433-419-8
- Кузьмин А. Записки по истории торпедных катеров. — Москва: Военмориздат НКВМФ СССР, 1939. — 136 с.
- А.Е. Тарас История торпедных катеров XIX-XX веков. — Минск: Харвест, 2005. — 416 с. — (Библиотека военной истории). — 2500 экз. — ISBN 985-13-3025-6
Ссылки
General construction of torpedo tubes(англ.)
The Fleet Type Submarine Online 21-Inch Submerged Torpedo Tubes(англ.)
Wikipedia(англ.)
Rotating central torpedo tubes(англ.)
Подводные Лодки
Projekt Torpedo Vorhaltrechner (пол.)
S-Boote in der Kriegsmarine 1935—1945(нем.)
Как устроена подводная лодка | Екабу.ру
 В 1979 году на заводе им. Ленинского Комсомола в Комсомольске-на-Амуре был заложен головной корабль проекта, который вступил в строй в 1982 году. Впоследствии корабли проекта 877 выпускались на судостроительных заводах в Ленинграде и Горьком.
В 1979 году на заводе им. Ленинского Комсомола в Комсомольске-на-Амуре был заложен головной корабль проекта, который вступил в строй в 1982 году. Впоследствии корабли проекта 877 выпускались на судостроительных заводах в Ленинграде и Горьком.Лодка имеет традиционную для советской школы подводного кораблестроения двухкорпусную конструкцию. Лёгкий корпус ограничивает развитую носовую оконечность, в верхней части которой находятся торпедные аппараты, а нижнюю занимает развитая основная антенна гидроакустического комплекса «Рубикон-М».
Ограждение выдвижных устройств находится над вторым отсеком и выполняет обычные свои функции — ходовой мостик, воздухозабор, обтекание и защита перископов, антенн и прочих подъёмно-мачтовых устройств, там же находится герметичный кранец для ПЗРК «Стрела-3М».
Прочный корпус разделён на шесть отсеков:
1. Первый отсек делится на три палубы. Верхняя занята торпедным оружием, средняя — жилая, в нижней — первая группа аккумуляторов.
2. Второй отсек также трёхпалубный. На верхней палубе — центральный пост, под ним — вторая палуба , на которой располагается рубка радиста и рубка одного из помощника штурмана. Через этот же отсек проходят все выдвижные устройства.
3. Третий отсек — трёхпалубный, жилой. Две палубы заняты помещениями экипажа, а нижняя — второй группой аккумуляторной батареи.
4. Четвёртый отсек — дизель-генераторный.
5. Пятый отсек — электромоторный. Из этого отсека выпускается кормовой аварийный буй.
6. Шестой отсек — кормовой, в нём находятся электродвигатель экономического хода и приводы рулей, кормовой люк.
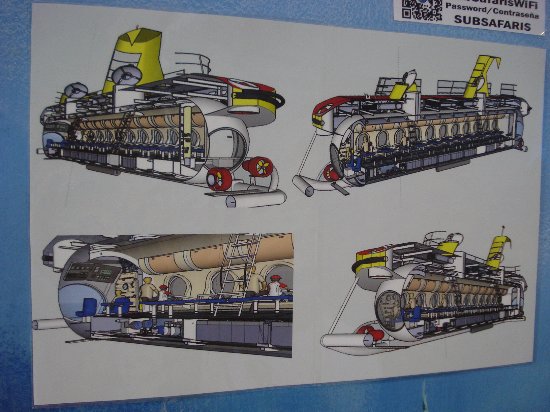
В музее центра судоремонта «Звездочка» находится модель подводной лодки проекта 877 «Палтус» — в разрезе, она дает вполне точное представление о том, как устроена среднестатистическая ПЛ.







Не пропустите:
Атомная подводная лодка «Редутабль», ставшая музеем (36 фото)
Проект подводной лодки с ракетным вооружением П-2
Первая советская экскурсионная подводная лодка «Нептун»
10 самых дорогих и роскошных подводных лодок
Подводные лодки проекта «Ясень»
Подземная база подводных лодок в Балаклаве
Отечественная подводная лодка проекта 613Э
К-162: самая быстрая подводная лодка в истории
Гигантская подводная лодка проекта 941 — «Акула»
Один день на борту подводной лодки ВМС США
Внутри подводной лодки
Заброшенная подводная лодка
Устройство и принцип работы подводной лодки
 В основе устройства подводной лодки лежит идея о способности судна погружаться под воду. Правда, для ее полноценного воплощения потребовалось около 700 лет.
В основе устройства подводной лодки лежит идея о способности судна погружаться под воду. Правда, для ее полноценного воплощения потребовалось около 700 лет.Первым упоминанием о далеком «предке» современных субмарин считается германское сказание «Салман и Моролф», датированное 1190 годом. Его главный герой – Моролф сумел построить лодку из кожи и скрыться от преследования вражеских кораблей, погрузившись на дно, где он пробыл две недели. Как утверждает автор сказания, все это время Моролф дышал через длинную трубку.
 Подводная лодка Корнелиуса Ван Дребеля
Подводная лодка Корнелиуса Ван ДребеляЧертежи подводных аппаратов встречаются у гениального Леонардо да Винчи. Первым судном, способным передвигаться в подводном положении стала подводная лодка из дерева и кожи, построенная по проекту Корнелиуса Ван Дребеля в 1620 году, у которой в качестве передвижения использовался шест – с его помощью можно было отталкиваться от дна.
 Чертежи ПЛ США XIX века
Чертежи ПЛ США XIX векаВ XVIII – XIX веках предпринимались попытки создания подводных аппаратов в Англии, Франции, США и России. К началу ХХ века сложились основные концептуальные особенности подводных лодок, что положило начало разработке тактики применения субмарин в боевой обстановке на морских театрах военных действий.
 Российская ПЛ Дельфин
Российская ПЛ ДельфинПринцип работы подводной лодки
Для нормального функционирования подводной лодки она должна:
- выдерживать давление воды в подводном положении;
- обеспечивать управляемость при погружении, всплытии и смене глубины;
- иметь оптимальную обтекаемую форму;
- сохранять работоспособность в соответствии с ее ТТХ.
Принцип погружения и всплытия
Для погружения под воду специальные цистерны на борту субмарины заполняются балластом (забортной водой). Все в соответствии с законом Архимеда – для полного погружения необходимо уровнять вес лодки с весом вытесненной воды.

При всплытии осуществляется обратный процесс – продув балласта, вследствие чего вода вытесняется из цистерн сжатым воздухом. В подводном положении лодка может менять глубину погружения с помощью рулей.

Ёмкости, заполняемые забортной водой, носят название цистерны главного балласта (ЦГБ). Они разделены на три группы – носовую, среднюю и кормовую. ЦГБ заполняются в зависимости от выполняемого ПЛ маневра. К примеру, при срочном погружении балластом заполняется цистерна быстрого погружения.

Как плавает подводная лодка
Подводная лодка в надводном положении плывет с открытыми кингстонами (клапанами для приема или откачки забортной воды) и аварийными захлопками (клапанами, через которые при заполнении цистерн водой выходит воздух). Вентиляционные клапаны закрыты. Лодка держится на поверхности за счет воздушной подушки в ЦГБ. В подводном положении кингстоны и аварийные захлопки открыты, а клапаны вентиляции закрыты.
Прочность и водонепроницаемость
От этих важнейших характеристик зависит живучесть ПЛ. Их обеспечивает особая конструкция корпуса субмарины, который в свою очередь может состоять из двух корпусов – прочного и легкого или только из прочного. В первом случае речь идет о российских подводных лодках, во втором – об американских.
Прочный корпус принимает на себя давление воды, для чего ему придается специальная оптимальная форма. Внутри прочного корпуса находятся все основные системы и устройства подводной лодки. Для создания прочных корпусов используются в основном высокопрочные легированные стали и титановые сплавы. Толщина обшивки прочного корпуса при диаметре 8-12 м может составлять от 40 до 60 мм и более.
 Отсеки АПЛ
Отсеки АПЛЛегкий корпус обеспечивает оптимальное обтекание во время плавания. Для обеспечения радиолокационной невидимости его «одевают» в специальное противорадиолокационное, звукоизолирующее резиновое покрытие. Внутри легкого корпуса размещаются балластные и топливные (для ДЭПЛ) цистерны, рулевые тяги и гидроакустические антенны.
В подводном положении межкорпусное пространство заполняется водой. Так-как давление на легкий корпус снаружи и изнутри уравновешено, нет необходимости делать его прочным. Толщина обшивки легкого корпуса составляет, как правило, от 8 до 16 мм.
Разделение на отсеки обеспечивают подводной лодке дополнительную живучесть. Отсеки отделены друг от друга водонепроницаемыми дверями-переборками с быстродействующими запирающими устройствами.
 Ракетный отсек АПЛ Юрий Долгорукий
Ракетный отсек АПЛ Юрий ДолгорукийПримерный перечень отсеков ДЭПЛ: носовой и кормовой торпедные отсеки; отсек главных гребных электродвигателей и электростанция; машинный отсек; жилые помещения команды; центральный пост.
Атомные подводные лодки
") Первая в мире АПЛ Наутилус (США)
Первая в мире АПЛ Наутилус (США)Первая в мире атомная подводная лодка – «Nautilus» была принята на вооружение в США в сентябре 1954 года. Спустя почти 5 лет, в январе 1959 года вступила в строй советская АПЛ К-3 проекта 627. По многим характеристикам, в частности, водоизмещению, скорости, числу гребных валов, автономности и численности экипажа они были схожи. И все же советская АПЛ имела на один реактор больше. Она превосходила американскую по мощности более чем в 2 раза и по скорости на 6 узлов.
 Первая советская АПЛ К3 проекта 627
Первая советская АПЛ К3 проекта 627Чтобы понять, как устроена атомная подводная лодка, следует уяснить главное ее отличие от обычной: это субмарина с ядерной силовой установкой, что дает ей ряд уникальных преимуществ:
- Ядерная энергия дает возможность АПЛ значительно увеличить время нахождения под водой – от 80 до 99 % всего ходового времени.
- Ядерное топливо – это гарантия неограниченной дальности плавания и независимости от береговых баз снабжения.
- Атомные энергетические установки обеспечивают субмарине скорость, соизмеримую со скоростью надводных кораблей.
- Помимо главной турбины, атомный реактор обеспечивает энергией многочисленные механизмы, системы и электронную аппаратуру.
 Российская АПЛ проект Борей
Российская АПЛ проект БорейМощное вооружение современных российских АПЛ – баллистические и крылатые ракеты различных типов многократно повысило боевые возможности подводного флота, сделав его одной из важнейших составляющих ядерной триады.
Источник питания — Как работают подводные лодки
Атомные подводные лодки используют ядерных реакторов , паровых турбин и редуктор для привода главного гребного вала, который обеспечивает прямую и обратную тягу в воде (электродвигатель приводит в движение тот же вал при стыковке или в аварийной ситуации) ,
Подводным лодкам также требуется электроэнергия для работы оборудования на борту. Для обеспечения этой энергии подводные лодки оснащены дизельными двигателями, сжигающими топливо, и / или ядерными реакторами, использующими ядерное деление.На подводных лодках также есть батареи для подачи электроэнергии. Электрооборудование часто работает от батарей, а энергия дизельного двигателя или ядерного реактора используется для зарядки батарей. В экстренных случаях батареи могут быть единственным источником электроэнергии для работы подводной лодки.
Дизельная подводная лодка — очень хороший пример гибридной машины. Большинство дизельных подводных лодок имеют два или более дизельных двигателя. Дизельные двигатели могут работать с пропеллерами или генераторами, которые заряжают очень большой аккумулятор.Или они могут работать в комбинации: один двигатель приводит в движение воздушный винт, а другой — генератор. Подводная лодка должна всплыть (или двигаться чуть ниже поверхности, используя трубку) для работы дизельных двигателей. Как только батареи будут полностью заряжены, подводная лодка может отправиться под воду. Батареи приводят в действие электродвигатели, приводящие в движение гребные винты. Работа от аккумулятора — единственный способ, которым дизельная подводная лодка может действительно погрузиться в воду. Ограничения аккумуляторной технологии сильно ограничивают время, в течение которого дизельная подлодка может оставаться под водой.
Из-за этих ограничений батарей было признано, что ядерная энергия на подводной лодке дает огромные преимущества.Ядерным генераторам не нужен кислород, поэтому атомная подводная лодка может оставаться под водой неделями. Кроме того, поскольку ядерного топлива хватает гораздо дольше, чем дизельного топлива (в годах), атомной подводной лодке не нужно выходить на поверхность или в порт для дозаправки, и она может дольше оставаться в море.
Атомные подводные лодки и авианосцы оснащены ядерными реакторами, которые почти идентичны реакторам, используемым на коммерческих электростанциях. Реактор вырабатывает тепло для выработки пара для привода паровой турбины.Турбина на корабле напрямую приводит в действие гребные винты, а также электрические генераторы. Два основных различия между коммерческими реакторами и реакторами на атомных кораблях:
- Реактор на атомном корабле меньше.
- В реакторе на ядерном корабле используется высокообогащенное топливо, позволяющее доставлять большое количество энергии из меньшего реактора.
См. «Как работает ядерная энергия» для получения подробной информации о ядерной энергии и двигательных установках.
,Технология 4-х подводных платформ | Технологии для военно-морского флота и корпуса морской пехоты США, 2000-2035: становление войск 21-го века: Том 6: Платформы
Тактические ракетные комплексы и системы противоракетной обороны ВМФ
Тактические ракетные комплексы и системы противоракетной обороны ВМФ войдут в состав подводных лодок будущего. Технологическая поддержка этих будущих миссий включает в себя пусковые установки, интеллектуальные боеголовки (например,g., «блестящее» противотанковое оружие), боеголовки глубокого проникновения и системы управления, подобные CEC.
Система защиты подводного оружия
Система защиты подводного оружия будет необходима для снижения угрозы торпед с расширенными возможностями. Интегрированная система, сочетающая автоматическое обнаружение и оповещение, автоматическое выполнение, глушилки и устройства обмана (например, ловушки), а также противодействие жесткому уничтожению, должна обеспечить надежное решение. Такая система также может быть эффективной против подводных лодок противника в ближнем бою или рукопашном бою.
Технологии полезной нагрузки для поддержки беспилотных и / или автономных подводных аппаратов
Беспилотные подводные аппараты (БПА) и автономные подводные аппараты (АНПА) предоставят будущим подводным лодкам множество новых возможностей, таких как дистанционная разведка и определение местоположения мин, сбор экологической и оперативной информации, внешнее зондирование, развертывание датчиков морского дна и акустика исходное позиционирование.
Технологии платформы, необходимые для поддержки этих транспортных средств, включают автоматизированные системы запуска и восстановления, методы технического обслуживания и восполнения энергии, системы планирования и управления миссией, а также защищенные подводные каналы связи для запуска или восстановления, управления, передачи данных, навигации и сближения.Важнейшими технологиями для самих транспортных средств являются усовершенствованное наведение и управление, а также повышенная плотность энергии (выносливость), например, усовершенствованные тепловые и гибридные тепло-электрические концепции с использованием металлического топлива. Технологии, которые позволяют подводным лодкам поддерживать БПА или АНПА, обычно применяются для размещения пилотируемых транспортных средств, таких как усовершенствованная система доставки SEAL и будущие пилотируемые мини-подводные лодки. Эта тема обсуждается далее в разделе о внедорожных транспортных средствах.
Технологии полезной нагрузки для поддержки сухопутных войск
Корпус морской пехотыили силы специальных операций представляют собой полезную нагрузку, которая обеспечивает подлодку универсальными и мощными возможностями для выполнения нескольких задач: разведки, саботажа, обнаружения мин и разминирования, целеуказания и т. Д.Большинство перечисленных технологий, которые поддерживают БПА или АПА, также применимы для поддержки миссий сил специальных операций. Дополнительные требования касаются автоматической и бесшумной блокировки или блокировки персонала и их транспортных средств, скрытно
,Гидрофоны, гидролокаторы и другое прослушивающее оборудование — Подводная лодка флота
Ряд устройств использовался как для обнаружения подводных лодок, так и для того, чтобы те же самые подводные лодки могли определять местоположение своих целей без необходимости поднимать на поверхность или поднимать перископ. Самыми ранними из этих устройств были гидрофоны.
Гидрофоны:
Гидрофоны чрезвычайно просты по своей концепции. В самом простом виде микрофон проходит через дно сосуда. Вращая микрофон, звукооператор может улавливать шумы гребного винта и оборудования, которые могут указывать на присутствие подводной лодки.
Инженерам не потребовалось много времени, чтобы понять, что пара высоконаправленных микрофонов, разделенных несколькими футами и способных вращаться в центре соединительной планки, будет более эффективной, чем один микрофон. С каждым микрофоном, подключенным к соответствующему наушнику оператора, опытный оператор может получить более точное определение источника звука.
В период между войнами эта концепция была разработана. Американский подводный гидрофон «JP» имел простую и высокоэффективную конструкцию.По сути, это длинный железный пруток с обмотанной вокруг него катушкой проволоки. Спина была покрыта звукопоглощающим материалом, поэтому она была относительно нечувствительна к звукам, исходящим сзади. Он был установлен на валу с маховиком в носовой торпедной комнате, которую оператор использовал для тренировки головы. При необходимости оператор мог подключить кабель к источнику питания для повторного намагничивания железного сердечника. (Сильные удары могут размагнитить магниты, поэтому гидрофон этого типа может перестать работать после детонации близкого глубинного заряда, пока сердечник не перемагнитится.)
Головка «JP» была установлена на верхней палубе подводных лодок американского флота. В этом положении он мог легко улавливать звуки надводных кораблей, не мешая звукам изнутри собственного корпуса подводной лодки. Разумеется, противолодочные корабли устанавливали гидрофоны ниже ватерлинии. При всплытии подлодки фиксировалась (выключалась) передача «JP».
Одним из устройств, которое помогало оператору навести на цель пеленг, был «волшебный глаз» на его панели усилителя.На самом деле это была специальная вакуумная трубка, верхняя часть которой торчала через отверстие в панели. Покрытие люминофором создавало изображение в форме пирога на верхней части трубки. Пожилые люди помнят устройство того же типа, которое использовалось в качестве измерителя настройки на старых FM-радиоприемниках. По мере того, как сигнал становится сильнее, «пирог» сужается, пока не станет линией максимальной мощности. Оператор мог смотреть это, чтобы улучшить свои навыки слушания.
Хотя одни гидрофоны могли определять направление на цель, их возможности были сильно ограничены.Дальность должна быть оценена на основе таких вещей, как громкость звука, что потребовало большого мастерства и опыта со стороны оператора. Целевая скорость определялась легче, поскольку оператор мог считать обороты гребных винтов подводной лодки. Пока имелась адекватная информация о типе цели, особенно о шаге винта, было возможно довольно точное определение ее скорости.
Предполагая, что винты цели имеют шаг 36 дюймов (то есть один оборот винта перемещает судно вперед на три фута), если винт вращается со скоростью 100 об / мин, цель должна перемещаться на 300 футов за каждую минуту. , или 18 000 футов в час.Разделив это число на 6076 (количество футов в морской миле), мы получим целевую скорость чуть менее 3 узлов. (Очевидно, это не особенно быстро, но для большинства подводных лодок до появления ядерной энергетики это тоже не было особенно медленным.)
Основным ограничением эффективности гидрофонов была скорость судна, на котором они были установлены. Противолодочные эскортные корабли были относительно медленными, часто с максимальной скоростью не более 18 узлов. На то было две причины.Во-первых, суда, которые они сопровождали, обычно были еще медленнее, поэтому высокая скорость не требовалась, чтобы идти в ногу. И, что более важно, эффективность их средств обнаружения быстро снижалась с увеличением скорости. На полной скорости радиус действия гидрофонов эсминца был настолько ограничен, что им, вероятно, пришлось бы ударить подводную лодку, чтобы обнаружить ее. Эту проблему создавал шум прохода эскорта по воде. Фактически, по этой причине эсминцы обычно не использовались в качестве эскорта конвоев во время Второй мировой войны, когда стали доступны специальные военные корабли — шлюпы, корветы, фрегаты или эсминцы эскорта.
ASDIC (Sonar):
Во время Первой мировой войны ученые союзников обратились к проблеме обнаружения подводных лодок в надежде найти что-то более эффективное, чем гидрофоны. Результат расследования британцы назвали Асдик, а американцы — Сонар. (Asdic — это аббревиатура от A nti S ubmarine D etection I nvestigation C ommittee; Sonar прибывает из SO и NA vigation и R anging.)
Самая простая форма комбинированных гидрофонов Asdic с источником звука. Излучатель посылал звуковой импульс, который отражался от цели. Время, необходимое для того, чтобы звук достиг цели и чтобы эхо вернулся, можно использовать для расчета дальности. Фактически, это тот же принцип, который используется эхолотом для определения глубины воды.
В период между войнами Асдик был достаточно развит, чтобы британское адмиралтейство пришло к выводу, что оно сделало подводную лодку бессильной в качестве невидимого оружия.Им потребовалось всего несколько недель, чтобы понять, что гораздо легче захватить цель в учениях (где корабли A / S знали, что где-то есть такая), чем в бою, когда капитан подводной лодки был собирается сделать все возможное, чтобы остаться незамеченным.
Конечно, не только противолодочные силы использовали средства обнаружения. Гидрофоны устанавливались на подводные лодки на ранней стадии разработки. Дальность плавания на подводном судне была значительно увеличена как потому, что электродвигатели подводной лодки были тише, чем двигатели надводных кораблей, так и из-за устранения поверхностных шумов.К концу Второй мировой войны немецкие операторы гидрофонной связи могли обнаруживать надводные корабли противника на дальностях до 50 миль.
Сонар был смешанным благословением для подводных лодок. Его можно было использовать для определения точной дальности и пеленга на надводную цель, но излучатель также обеспечивал направление для сил ПВО противника. (Радар всегда страдал от одного и того же синдрома благословения / проклятия; он предупреждает вас о приближении врага, но также сообщает врагу, где находится , а вы — .) Головка сонара на картинке была частью комплекта сонаров на американском флоте. подводная лодка, и в закрепленном состоянии могла убираться внутрь корпуса.
Довоенные американские теоретики подводных лодок были настолько уверены в возможностях сонара на подводных лодках, что доктрина требовала, чтобы все атаки проводились под водой, используя только сонар, и никогда не открывая перископ. Считалось, что радар достаточно развит, так что обнажение перископа было слишком большим риском. Как оказалось, перископические атаки оставались основным методом, поскольку методы атаки сонара приводили к слишком большому количеству промахов. Кроме того, японские военные корабли не спешили добавлять радар к своему оборудованию, но их сопровождение оказалось отличным звуковым оборудованием, поэтому американские эхолоты обеспечивали лучшую цель, чем открытые перископы.По этой причине эмиттеры обычно использовались при настройке одиночного пинга для определения дальности, а не в активном поиске.
Поскольку преобразователь сонара сочетает в себе излучатель и приемник, его также можно использовать для прослушивания сонара эскорта. Когда это происходило, головку можно было повернуть, чтобы получить ответный подшипник. Сопровождение обычно излучается постоянно.
Современная доктрина подводных лодок требует, чтобы лодки были оснащены мощными, сложными и активными гидролокаторами, и чтобы это оборудование практически никогда не использовалось.Большая часть обнаружения все еще выполняется с использованием современного воплощения старых гидрофонов, хотя теперь оно связано с набором электронного оборудования, которое дает гораздо больше информации, чем старые операторы могли получить, просто прослушивая. Оборудование теперь достаточно сложное, чтобы определять дальность действия, например, с помощью пассивного средства обнаружения. В то же время самым важным фактором остается квалификация оператора. Вопреки тому, что встречается во многих техно-триллерах, компьютеры не так много делают для анализа, как думают многие люди, и контакты по-прежнему определяются в основном операторами на основе навыков и опыта, хотя этот навык дополнен очень сложным оборудованием.
Вплоть до Второй мировой войны подводные лодки использовались в основном для борьбы с судоходством. Изначально целями были боевые надводные корабли. Германия признала полезность подводной лодки в роли торгового рейдера в начале Первой мировой войны. Эта роль достигла своего предела во Второй мировой войне, когда Германия попыталась использовать свои подводные лодки, чтобы перекрыть маршруты конвоев от США в Великобританию. (Хотя никогда не было так успешно, как предполагала одна из сторон.) Американские подводные лодки в Тихом океане на самом деле сделали , фактически уничтожив японский торговый флот.По крайней мере, они смогли это сделать, когда проблемы с торпедами были окончательно решены после полутора лет разочарований.
Сегодня основной целью подводной лодки обычно является другая подводная лодка. Отсюда важность бесшумной работы. Подводная лодка, которая первой услышит своего врага, обычно становится победителем в таком столкновении.
.Получите бесплатную атаку подводной лодки — Microsoft Store
Этот сайт использует файлы cookie для аналитики, персонализированного контента и рекламы. Продолжая просматривать этот сайт, вы соглашаетесь с этим использованием. Выучить больше Перейти к основному содержанию MicrosoftДомой
ДомойДомой
- Домой
- приборы
- Программное обеспечение
- Игры и развлечения
- предложения
- Поиск магазинов
- Магазин Бизнес
- Студенты и родители
- Больше
- Все Microsoft